Isaac Lab 生态系统#
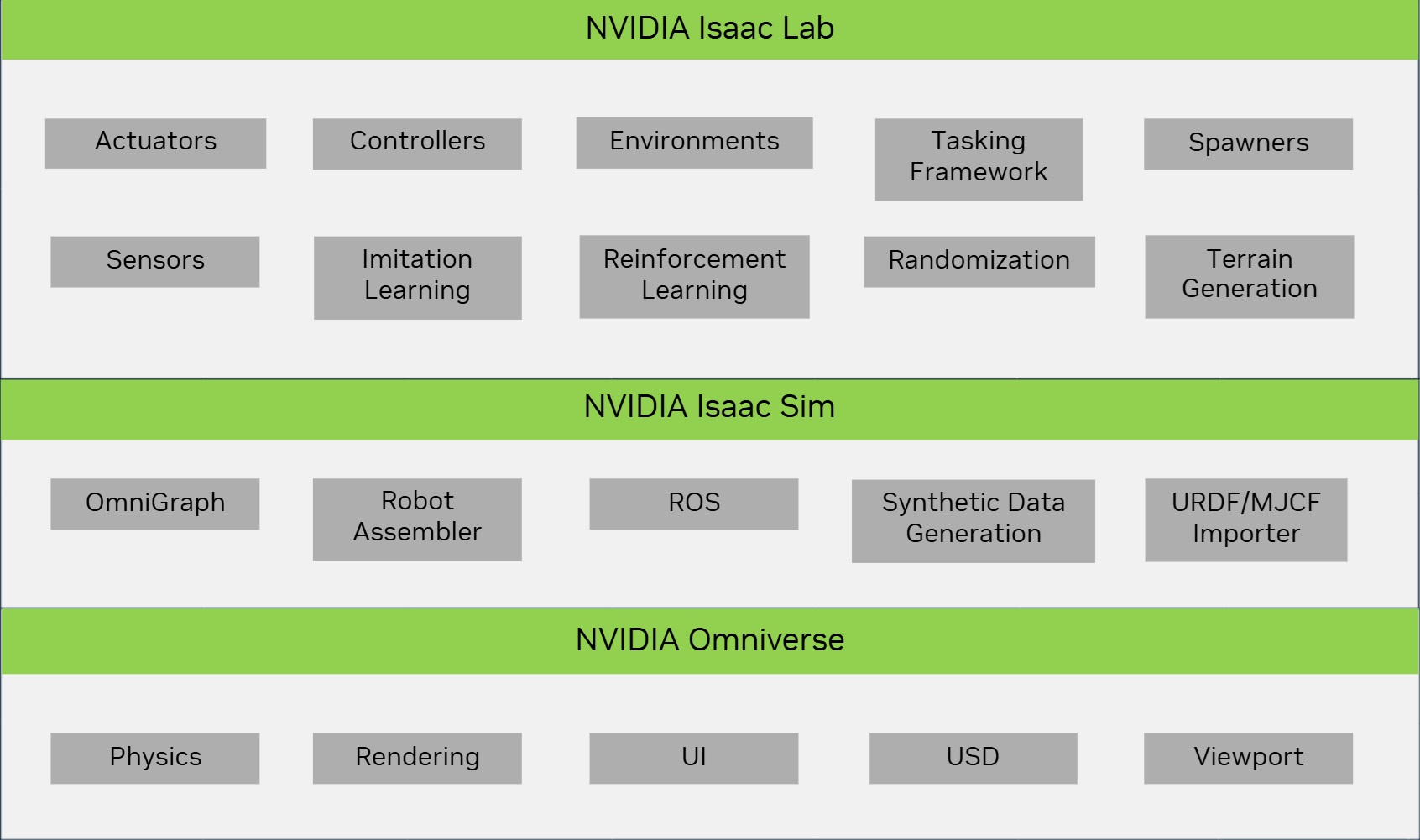
Isaac Lab 建立在 Isaac Sim 之上,利用最新的仿真技术提供了一个统一且灵活的机器人学习框架。它设计为模块化和可扩展的,旨在简化机器人研究中的常见工作流(例如强化学习、示范学习和运动规划)。虽然它包含一些预构建的环境、传感器和任务,但其主要目标是提供一个开源、统一且易于使用的接口,用于开发和测试自定义环境和机器人学习算法。
使用 Isaac Lab 需要安装 Isaac Sim,它包含了 Isaac Lab 所依赖的核心机器人工具,包括 URDF 和 MJCF 导入器、仿真管理器以及 ROS 功能。Isaac Sim 还基于 NVIDIA Omniverse 平台,利用了来自 PhysX 的高级物理仿真、逼真的渲染技术以及用于场景创建的 Universal Scene Description (USD)。
Isaac Lab 不仅继承了 Isaac Sim 的功能,还增加了许多与机器人学习研究相关的新特性。例如,包括在仿真中加入驱动器动态、程序性地形生成,以及支持从人类示范中收集数据。
Isaac Lab 在 Isaac 生态系统中处于什么位置?#
多年来,NVIDIA 开发了许多用于机器人和人工智能的工具。这些工具利用 GPU 的强大性能来加速仿真,不仅在速度上,还有在现实感上。它们在仿真技术领域展现出巨大的潜力,并且被全球许多研究人员和公司广泛使用。
Isaac Gym [MWG+21] 提供了一个基于 GPU 的高性能物理仿真用于机器人学习。它建立在 PhysX 之上,支持加速刚体仿真的 GPU 仿真,并提供一个 Python API 以直接访问物理仿真数据。通过端到端的 GPU 流水线,与基于 CPU 的物理引擎相比,可以实现更高的帧率。该工具已经在多个研究项目中成功应用,包括腿部运动 [RHRH22] [RHBH22]、手内操作 [HAM+22] [AML+22] 和工业组装 [NSA+22] 。
尽管 Isaac Gym 取得了成功,但它并不是为了成为一个通用的机器人仿真器而设计的。例如,它不包括可变形物体与刚性物体之间的交互、高保真渲染和对 ROS 的支持。该工具主要作为预览版发布,旨在展示底层物理引擎的能力。随着 Isaac Sim 的发布,NVIDIA 正在构建一个通用的机器人仿真器,并将 Isaac Gym 的功能集成到 Isaac Sim 中。
Isaac Sim 是一个基于 Omniverse 的机器人仿真工具包,Omniverse 是一个通用平台,旨在统一复杂的 3D 工作流。Isaac Sim 利用图形和物理仿真领域的最新进展,为机器人提供高保真的仿真环境。它支持 ROS/ROS2、各种传感器仿真、领域随机化工具以及合成数据创建。Isaac Sim 中的平铺渲染支持在环境中进行向量化渲染,并支持在云中运行,使用 Isaac Automator 。总体来说,它是一个强大的机器人工具,对于机器人学家来说,是机器人仿真领域的一大进步。
随着上述两个工具的发布,NVIDIA 还发布了一组开源的环境,名为 IsaacGymEnvs 和 OmniIsaacGymEnvs ,它们分别建立在 Isaac Gym 和 Isaac Sim 之上。这些环境旨在展示底层仿真器的能力,并提供一个起点,帮助理解使用这些仿真器进行机器人学习的可能性。这些环境可以用于基准测试,但并不适用于开发和测试自定义环境和算法。此时,Isaac Lab 扮演着重要角色。
Isaac Lab 建立在 Isaac Sim 之上,利用最新的仿真技术提供了一个统一且灵活的机器人学习框架。它设计为模块化和可扩展的,旨在简化机器人研究中的常见工作流(例如强化学习、示范学习和运动规划)。虽然它包含一些预构建的环境、传感器和任务,但其主要目标是提供一个开源、统一且易于使用的接口,用于开发和测试自定义环境和机器人学习算法。它不仅继承了 Isaac Sim 的功能,还增加了许多与机器人学习研究相关的新特性,例如在仿真中包含执行器动力学、程序化地形生成,以及支持从人类示范中收集数据。
Isaac Lab 替代了之前的 IsaacGymEnvs 、 OmniIsaacGymEnvs 和 Orbit 框架,并将成为 Isaac Sim 的单一机器人学习框架。先前发布的框架已被弃用,我们鼓励用户遵循我们的迁移指南,以便过渡到 Isaac Lab。
Isaac Lab 是一个仿真器吗?#
通常,当人们想到仿真器时,他们会想到各种常见的引擎,例如 MuJoCo 、 Bullet 和 Flex 。这些引擎功能强大,在许多研究项目中被使用。然而,它们并非设计成用于机器人的通用仿真器。相反,它们主要是物理引擎,用于模拟刚性和可变形体的动力学。它们带有一些基本的渲染功能,用于可视化模拟,并提供了不同场景描述格式的解析功能。
最近的一些作品将这些物理引擎与不同的渲染引擎结合在一起,提供更完整的模拟环境。它们包括允许读写物理和渲染引擎的API。在某些情况下,它们支持ROS和硬件在环模拟,用于更具有机器人特定应用的情况。其中一些例子包括 AirSim 、 DoorGym 、 ManiSkill 、 ThreeDWorld ,最后还有 Isaac Sim 。
在其核心,Isaac Lab 不是 一个机器人仿真器,而是建立在Isaac Sim之上的机器人学习应用程序框架。这样的框架的等价示例是 RoboSuite ,它是构建在 MuJoCo 之上的,并且专门针对固定基座机器人。其他示例包括 MuJoCo Playground 和 Isaac Gym ,分别使用 MJX 和 PhysX 。它们包括许多预先构建的任务,并针对各个任务具有各自分离的独立实现。虽然这是一个很好的起点(并且通常很方便),但在不同任务实现之间会发生大量代码重复,这可能会减少较大项目和团队的代码复用。
Isaac Lab 的主要目标是为机器人学习提供一个统一的框架,其中包括各种工具和功能,这些工具和功能对于机器人学习是必需的,同时易于使用和扩展。它包括简化许多常见机器人研究需求的设计模式。这些需求包括以不同频率模拟传感器、连接不同的远程操作界面以进行数据收集、为策略学习切换动作空间、使用 Hydra 进行配置管理、支持不同的学习库等。Isaac Lab 支持使用 基于管理器的(模块化) 和 直接(类似于 Isaac Gym 的单一脚本) 模式设计任务,让用户选择最适合他们用例的最佳方法。对于这些模式中的每一个,Isaac Lab 包含许多预构建的任务,可以用于基准测试和研究。
为什么我应该使用 Isaac Lab?#
Isaac Lab 提供了一个开源平台,供社区共同努力推动进展,致力于设计基准测试和机器人学习系统,作为一项联合倡议。这使我们能够重用现有组件和算法,并在彼此的工作基础上构建。这样做不仅节省了时间和精力,还让我们能够专注于研究中更重要的方面。我们希望 Isaac Lab 成为机器人学习研究的事实标准平台,以及一个利用 Isaac Sim 的环境 zoo 。随着框架的成熟,我们预见到它将从最新的仿真发展(作为 NVIDIA 和合作伙伴内部开发的一部分)以及机器人学研究中受益匪浅。
我们已经在与大学和研究机构的实验室合作,将他们的工作整合到 Isaac Lab 中,并希望社区中的其他人也能加入我们这一努力。如果您有兴趣为 Isaac Lab 做出贡献,请与我们联系。