训练 Jetbot: 基准真相#
有了定义的环境,我们现在可以开始修改我们的观测和奖励,以训练一个策略来充当 Jetbot 的控制器。作为用户,我们希望能够指定 Jetbot 驾驶的期望方向,并使车轮转动,使机器人以尽可能快的速度驾驶在指定的方向上。我们如何使用强化学习(RL)来实现这一点?如果您想直接查看此场景的结果,请查看本教程存储库的 此分支!
扩展环境#
我们需要做的第一件事是为场景上的每个 Jetbot 创建设置指令的逻辑。每个指令将是一个单位向量,我们需要为场景上机器人的每个克隆都需要一个,这意味着一个形状为 [num_envs, 3] 的张量。尽管 Jetbot 只在二维平面中导航,但通过使用三维向量,我们可以利用 Isaac Lab 提供的所有数学工具。
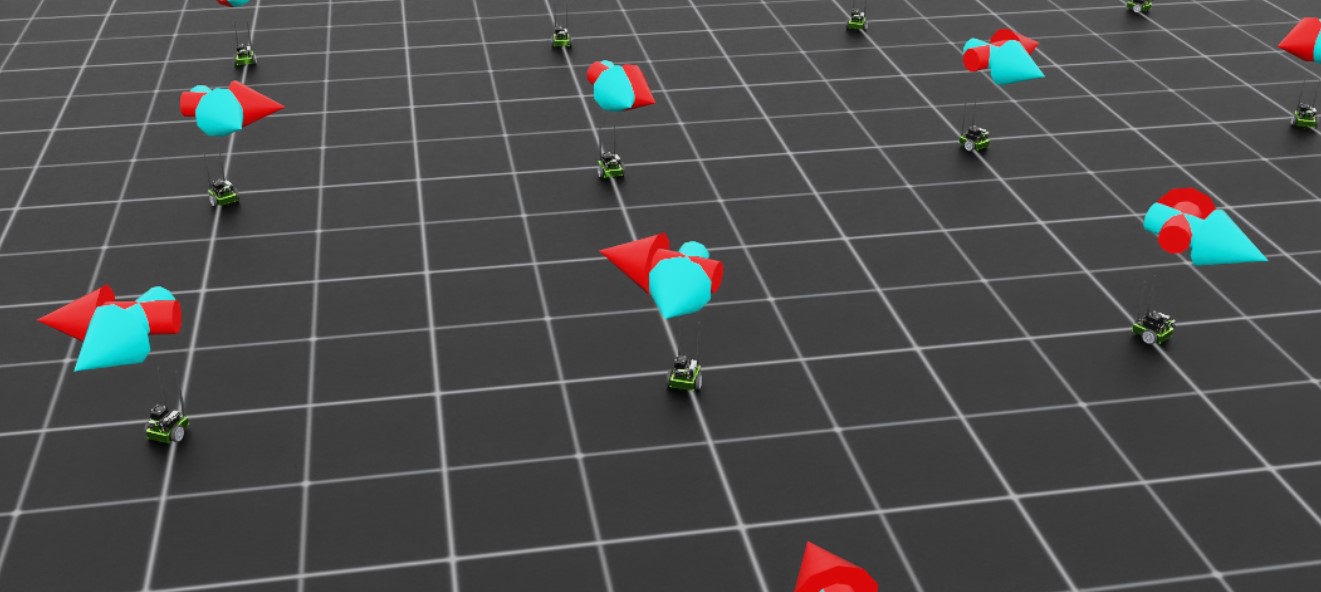
设置可视化也是一个好主意,这样我们在训练和推断过程中更容易了解策略的行为。在这种情况下,我们将定义两个箭头 VisualizationMarkers : 一个表示机器人的 "前进" 方向,另一个表示指令方向。当策略完全训练好时,这些箭头应该对齐!在早期设置这些可视化有助于我们避免 "潜在错误" : 代码中的问题不会导致崩溃。
首先,我们需要定义标志配置,然后使用该配置实例化标志。将以下内容添加到 isaac_lab_tutorial_env.py 的全局范围内
from isaaclab.markers import VisualizationMarkers, VisualizationMarkersCfg
from isaaclab.utils.assets import ISAAC_NUCLEUS_DIR
import isaaclab.utils.math as math_utils
def define_markers() -> VisualizationMarkers:
"""Define markers with various different shapes."""
marker_cfg = VisualizationMarkersCfg(
prim_path="/Visuals/myMarkers",
markers={
"forward": sim_utils.UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/UIElements/arrow_x.usd",
scale=(0.25, 0.25, 0.5),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 1.0)),
),
"command": sim_utils.UsdFileCfg(
usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/UIElements/arrow_x.usd",
scale=(0.25, 0.25, 0.5),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),
),
},
)
return VisualizationMarkers(cfg=marker_cfg)
VisualizationMarkersCfg 定义 USD 原语来充当 "标志" 。 任何原语都可以,但通常您希望尽可能简化标志,因为在每个时间步骤运行时会对标志进行克隆。这是因为这些标志的目的仅用于 调试可视化 ,并不是仿真的一部分: 用户完全可以控制何时在何处绘制多少标志。NVIDIA在我们的公共nucleus服务器上提供了几个简单的网格,位于 ISAAC_NUCLEUS_DIR ,出于明显的原因,我们选择使用 arrow_x.usd 。
有关使用 VisualizationMarkers 的更详细示例,请查看 markers.py 演示!
markers.py 演示的代码
1# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
2# All rights reserved.
3#
4# SPDX-License-Identifier: BSD-3-Clause
5
6"""This script demonstrates different types of markers.
7
8.. code-block:: bash
9
10 # Usage
11 ./isaaclab.sh -p scripts/demos/markers.py
12
13"""
14
15"""Launch Isaac Sim Simulator first."""
16
17import argparse
18
19from isaaclab.app import AppLauncher
20
21# add argparse arguments
22parser = argparse.ArgumentParser(description="This script demonstrates different types of markers.")
23# append AppLauncher cli args
24AppLauncher.add_app_launcher_args(parser)
25# parse the arguments
26args_cli = parser.parse_args()
27
28# launch omniverse app
29app_launcher = AppLauncher(args_cli)
30simulation_app = app_launcher.app
31
32"""Rest everything follows."""
33
34import torch
35
36import isaaclab.sim as sim_utils
37from isaaclab.markers import VisualizationMarkers, VisualizationMarkersCfg
38from isaaclab.sim import SimulationContext
39from isaaclab.utils.assets import ISAAC_NUCLEUS_DIR, ISAACLAB_NUCLEUS_DIR
40from isaaclab.utils.math import quat_from_angle_axis
41
42
43def define_markers() -> VisualizationMarkers:
44 """Define markers with various different shapes."""
45 marker_cfg = VisualizationMarkersCfg(
46 prim_path="/Visuals/myMarkers",
47 markers={
48 "frame": sim_utils.UsdFileCfg(
49 usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/UIElements/frame_prim.usd",
50 scale=(0.5, 0.5, 0.5),
51 ),
52 "arrow_x": sim_utils.UsdFileCfg(
53 usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/UIElements/arrow_x.usd",
54 scale=(1.0, 0.5, 0.5),
55 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 1.0)),
56 ),
57 "cube": sim_utils.CuboidCfg(
58 size=(1.0, 1.0, 1.0),
59 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),
60 ),
61 "sphere": sim_utils.SphereCfg(
62 radius=0.5,
63 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0)),
64 ),
65 "cylinder": sim_utils.CylinderCfg(
66 radius=0.5,
67 height=1.0,
68 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 0.0, 1.0)),
69 ),
70 "cone": sim_utils.ConeCfg(
71 radius=0.5,
72 height=1.0,
73 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 1.0, 0.0)),
74 ),
75 "mesh": sim_utils.UsdFileCfg(
76 usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Blocks/DexCube/dex_cube_instanceable.usd",
77 scale=(10.0, 10.0, 10.0),
78 ),
79 "mesh_recolored": sim_utils.UsdFileCfg(
80 usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Blocks/DexCube/dex_cube_instanceable.usd",
81 scale=(10.0, 10.0, 10.0),
82 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.25, 0.0)),
83 ),
84 "robot_mesh": sim_utils.UsdFileCfg(
85 usd_path=f"{ISAACLAB_NUCLEUS_DIR}/Robots/ANYbotics/ANYmal-C/anymal_c.usd",
86 scale=(2.0, 2.0, 2.0),
87 visual_material=sim_utils.GlassMdlCfg(glass_color=(0.0, 0.1, 0.0)),
88 ),
89 },
90 )
91 return VisualizationMarkers(marker_cfg)
92
93
94def main():
95 """Main function."""
96 # Load kit helper
97 sim_cfg = sim_utils.SimulationCfg(dt=0.01, device=args_cli.device)
98 sim = SimulationContext(sim_cfg)
99 # Set main camera
100 sim.set_camera_view([0.0, 18.0, 12.0], [0.0, 3.0, 0.0])
101
102 # Spawn things into stage
103 # Lights
104 cfg = sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75))
105 cfg.func("/World/Light", cfg)
106
107 # create markers
108 my_visualizer = define_markers()
109
110 # define a grid of positions where the markers should be placed
111 num_markers_per_type = 5
112 grid_spacing = 2.0
113 # Calculate the half-width and half-height
114 half_width = (num_markers_per_type - 1) / 2.0
115 half_height = (my_visualizer.num_prototypes - 1) / 2.0
116 # Create the x and y ranges centered around the origin
117 x_range = torch.arange(-half_width * grid_spacing, (half_width + 1) * grid_spacing, grid_spacing)
118 y_range = torch.arange(-half_height * grid_spacing, (half_height + 1) * grid_spacing, grid_spacing)
119 # Create the grid
120 x_grid, y_grid = torch.meshgrid(x_range, y_range, indexing="ij")
121 x_grid = x_grid.reshape(-1)
122 y_grid = y_grid.reshape(-1)
123 z_grid = torch.zeros_like(x_grid)
124 # marker locations
125 marker_locations = torch.stack([x_grid, y_grid, z_grid], dim=1)
126 marker_indices = torch.arange(my_visualizer.num_prototypes).repeat(num_markers_per_type)
127
128 # Play the simulator
129 sim.reset()
130 # Now we are ready!
131 print("[INFO]: Setup complete...")
132
133 # Yaw angle
134 yaw = torch.zeros_like(marker_locations[:, 0])
135 # Simulate physics
136 while simulation_app.is_running():
137 # rotate the markers around the z-axis for visualization
138 marker_orientations = quat_from_angle_axis(yaw, torch.tensor([0.0, 0.0, 1.0]))
139 # visualize
140 my_visualizer.visualize(marker_locations, marker_orientations, marker_indices=marker_indices)
141 # roll corresponding indices to show how marker prototype can be changed
142 if yaw[0].item() % (0.5 * torch.pi) < 0.01:
143 marker_indices = torch.roll(marker_indices, 1)
144 # perform step
145 sim.step()
146 # increment yaw
147 yaw += 0.01
148
149
150if __name__ == "__main__":
151 # run the main function
152 main()
153 # close sim app
154 simulation_app.close()
接下来,我们需要扩展初始化和设置步骤,以构建我们需要用于跟踪命令以及标志位置和旋转的数据。将 _setup_scene 的内容替换为以下内容
def _setup_scene(self):
self.robot = Articulation(self.cfg.robot_cfg)
# add ground plane
spawn_ground_plane(prim_path="/World/ground", cfg=GroundPlaneCfg())
# clone and replicate
self.scene.clone_environments(copy_from_source=False)
# add articulation to scene
self.scene.articulations["robot"] = self.robot
# add lights
light_cfg = sim_utils.DomeLightCfg(intensity=2000.0, color=(0.75, 0.75, 0.75))
light_cfg.func("/World/Light", light_cfg)
self.visualization_markers = define_markers()
# setting aside useful variables for later
self.up_dir = torch.tensor([0.0, 0.0, 1.0]).cuda()
self.yaws = torch.zeros((self.cfg.scene.num_envs, 1)).cuda()
self.commands = torch.randn((self.cfg.scene.num_envs, 3)).cuda()
self.commands[:,-1] = 0.0
self.commands = self.commands/torch.linalg.norm(self.commands, dim=1, keepdim=True)
# offsets to account for atan range and keep things on [-pi, pi]
ratio = self.commands[:,1]/(self.commands[:,0]+1E-8)
gzero = torch.where(self.commands > 0, True, False)
lzero = torch.where(self.commands < 0, True, False)
plus = lzero[:,0]*gzero[:,1]
minus = lzero[:,0]*lzero[:,1]
offsets = torch.pi*plus - torch.pi*minus
self.yaws = torch.atan(ratio).reshape(-1,1) + offsets.reshape(-1,1)
self.marker_locations = torch.zeros((self.cfg.scene.num_envs, 3)).cuda()
self.marker_offset = torch.zeros((self.cfg.scene.num_envs, 3)).cuda()
self.marker_offset[:,-1] = 0.5
self.forward_marker_orientations = torch.zeros((self.cfg.scene.num_envs, 4)).cuda()
self.command_marker_orientations = torch.zeros((self.cfg.scene.num_envs, 4)).cuda()
大部分是为命令和标志设置记录,但命令初始化和航向计算值得深入研究。命令通过 torch.randn 从一个多变量正态分布采样,其中 z 分量固定为零,然后归一化为单位长度。为了让我们的命令标志沿着这些向量指向,我们需要适当旋转基本箭头网格。这意味着我们需要定义一个 四元数 ,这个四元数将使箭头原语绕 z 轴旋转一定角度。按照惯例,绕 z 轴的旋转称为 "yaw" 旋转(类似于roll和pitch)。
幸运的是,Isaac Lab 提供了一个从旋转轴和角度生成四元数的实用程序: isaaclab.utils.math.quat_from_axis_angle() ,现在唯一棘手的部分是确定那个角度。

yaw是围绕 z 轴定义的,yaw为 0 与 x 轴对齐,并且正角度逆时针打开。命令向量的 x 和 y 分量定义了这个角的切线,因此我们需要这个比率的 反正切 来获得yaw。
现在考虑两个命令: 命令 A 在第二象限处 (-x,y),而命令 B 在第四象限处 (x,-y)。对于 A 和 B,y 分量与 x 分量的比率是相同的。如果我们不考虑这一点,那么一些命令箭头将指向与命令相反的方向!本质上,我们的命令是定义在 [-pi, pi] 上的,但 反正切 仅在 [-pi/2, pi/2] 上定义。
为了纠正这一点,根据命令所在象限添加或减去 pi 来确定yaw。
ratio = self.commands[:,1]/(self.commands[:,0]+1E-8) #in case the x component is zero
gzero = torch.where(self.commands > 0, True, False)
lzero = torch.where(self.commands < 0, True, False)
plus = lzero[:,0]*gzero[:,1]
minus = lzero[:,0]*lzero[:,1]
offsets = torch.pi*plus - torch.pi*minus
self.yaws = torch.atan(ratio).reshape(-1,1) + offsets.reshape(-1,1)
涉及张量的布尔表达式可能具有模糊的定义,pytorch 将抛出与此相关的错误。 Pytorch 提供了各种方法使定义明确化。方法 torch.where 生成一个与输入形状相同的张量,输出的每个元素都是根据该元素的评估而确定的。处理张量的布尔运算的一个可靠方法是简单地生成布尔索引张量,然后用代数方式表示操作,将 AND 表示为乘法, OR 表示为加法,这就是我们在上面所做的。 这等同于伪代码:
yaws = torch.atan(ratio)
yaws[commands[:,0] < 0 and commands[:,1] > 0] += torch.pi
yaws[commands[:,0] < 0 and commands[:,1] < 0] -= torch.pi
接下来是实际可视化标志的方法。记住,这些标志不是场景实体!我们需要在想看到它们时 "绘制" 它们。
def _visualize_markers(self):
# get marker locations and orientations
self.marker_locations = self.robot.data.root_pos_w
self.forward_marker_orientations = self.robot.data.root_quat_w
self.command_marker_orientations = math_utils.quat_from_angle_axis(self.yaws, self.up_dir).squeeze()
# offset markers so they are above the jetbot
loc = self.marker_locations + self.marker_offset
loc = torch.vstack((loc, loc))
rots = torch.vstack((self.forward_marker_orientations, self.command_marker_orientations))
# render the markers
all_envs = torch.arange(self.cfg.scene.num_envs)
indices = torch.hstack((torch.zeros_like(all_envs), torch.ones_like(all_envs)))
self.visualization_markers.visualize(loc, rots, marker_indices=indices)
VisualizationMarkers 的 visualize 方法类似于这个 "draw" 函数。它接受用于标志的空间变换的张量,以及一个 marker_indices 张量,用于指定每个标志原型用于每个标志。 只要所有这些张量的第一个维度匹配,此函数将使用指定的转换绘制这些标志。 这就是我们堆叠位置、旋转和索引的原因。
现在,我们只需要在预物理步骤上调用 _visualize_markers 来使箭头可见。将 _pre_physics_step 替换为以下内容
def _pre_physics_step(self, actions: torch.Tensor) -> None:
self.actions = actions.clone()
self._visualize_markers()
进入 RL 训练之前的最后一项主要修改是更新 _reset_idx 方法以考虑命令和标志。每当重置环境时,我们都需要生成一个新的命令并重置标志。 这方面的逻辑已经在上面讨论过。将 _reset_idx 的内容替换为以下内容:
def _reset_idx(self, env_ids: Sequence[int] | None):
if env_ids is None:
env_ids = self.robot._ALL_INDICES
super()._reset_idx(env_ids)
# pick new commands for reset envs
self.commands[env_ids] = torch.randn((len(env_ids), 3)).cuda()
self.commands[env_ids,-1] = 0.0
self.commands[env_ids] = self.commands[env_ids]/torch.linalg.norm(self.commands[env_ids], dim=1, keepdim=True)
# recalculate the orientations for the command markers with the new commands
ratio = self.commands[env_ids][:,1]/(self.commands[env_ids][:,0]+1E-8)
gzero = torch.where(self.commands[env_ids] > 0, True, False)
lzero = torch.where(self.commands[env_ids]< 0, True, False)
plus = lzero[:,0]*gzero[:,1]
minus = lzero[:,0]*lzero[:,1]
offsets = torch.pi*plus - torch.pi*minus
self.yaws[env_ids] = torch.atan(ratio).reshape(-1,1) + offsets.reshape(-1,1)
# set the root state for the reset envs
default_root_state = self.robot.data.default_root_state[env_ids]
default_root_state[:, :3] += self.scene.env_origins[env_ids]
self.robot.write_root_state_to_sim(default_root_state, env_ids)
self._visualize_markers()
就是这样!我们现在生成命令并可以可视化 Jetbot 的航向了。我们准备开始调整观测和奖励。