可用环境#
以下列表包含在 Isaac Lab 中可用的所有 RL 和 IL 任务实现。尽管我们尽量保持此列表最新,您仍可以通过运行以下命令获取最新的环境列表:以下列表包含在 Isaac Lab 中可用的所有 RL 和 IL 任务实现。尽管我们尽量保持此列表最新,您仍可以通过运行以下命令获取最新的环境列表:
备注
使用 --keyword <search_term> (可选)按关键字过滤环境。
./isaaclab.sh -p scripts/environments/list_envs.py --keyword <search_term>
备注
使用 --keyword <search_term> (可选)按关键字过滤环境。
isaaclab.bat -p scripts\environments\list_envs.py --keyword <search_term>
我们正在积极努力将更多的环境添加到列表中。如果您有任何想要添加到Isaac Lab的环境,请随时提交拉取请求!
单一智能体#
经典#
基于 IsaacGymEnvs 实现的 MuJoCo 风格环境的经典环境。
世界 |
环境 ID |
描述 |
|---|---|---|
|
朝着一个方向移动,与 MuJoCo 人形机器人。 |
|
|
朝着一个方向移动,与MuJoCo蚂蚁机器人 |
|
|
移动小车以保持杆子在经典的 cartpole 控制中向上 |
|
|
移动小车以保持杆子向上在经典的 cartpole 控制和感知输入中。需要使用 |
|
|
移动小车以保持杆子向上在经典的 cartpole 控制,该控制基于使用预训练的冻结视觉编码器从感知输入中提取的特征。需要使用 |
操作臂#
基于固定机械臂操作任务的环境。
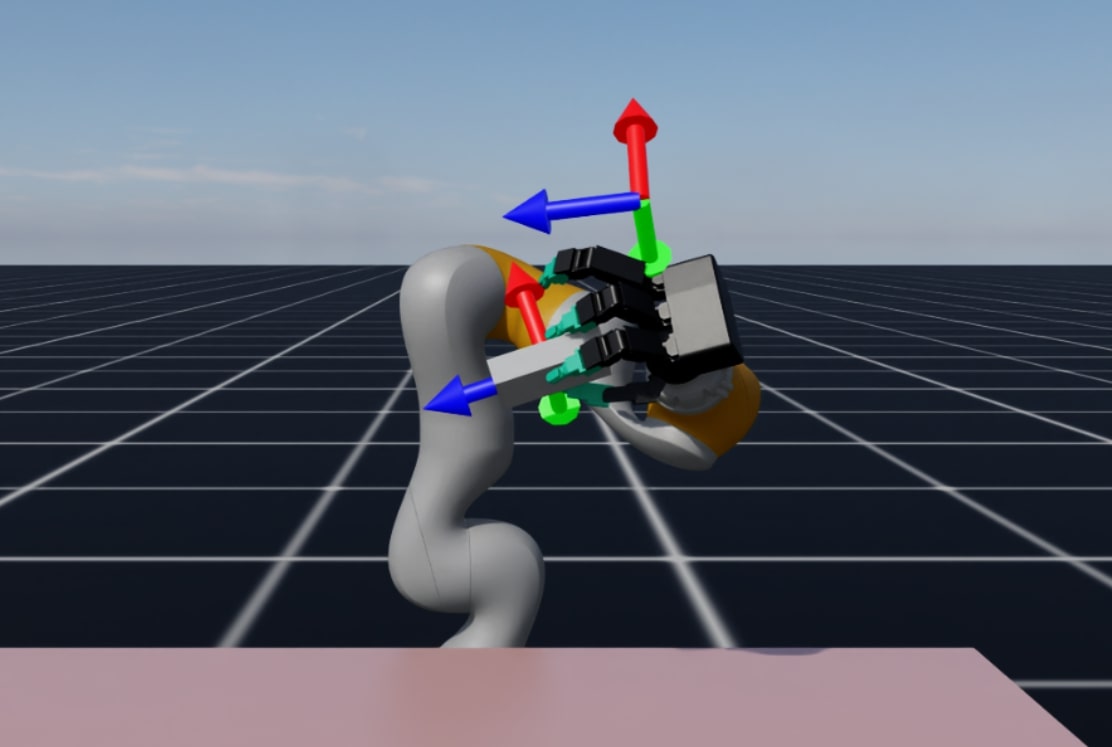
对于许多这些任务,我们包括具有不同手臂动作空间的配置。例如,对于 lift-cube 环境:
Isaac-Lift-Cube-Franka-v0: Franka机械臂关节位置控制
Isaac-Lift-Cube-Franka-IK-Abs-v0: Franka机械臂绝对IK控制
Isaac-Lift-Cube-Franka-IK-Rel-v0: Franka机械臂相对IK控制
世界 |
环境 ID |
描述 |
|---|---|---|
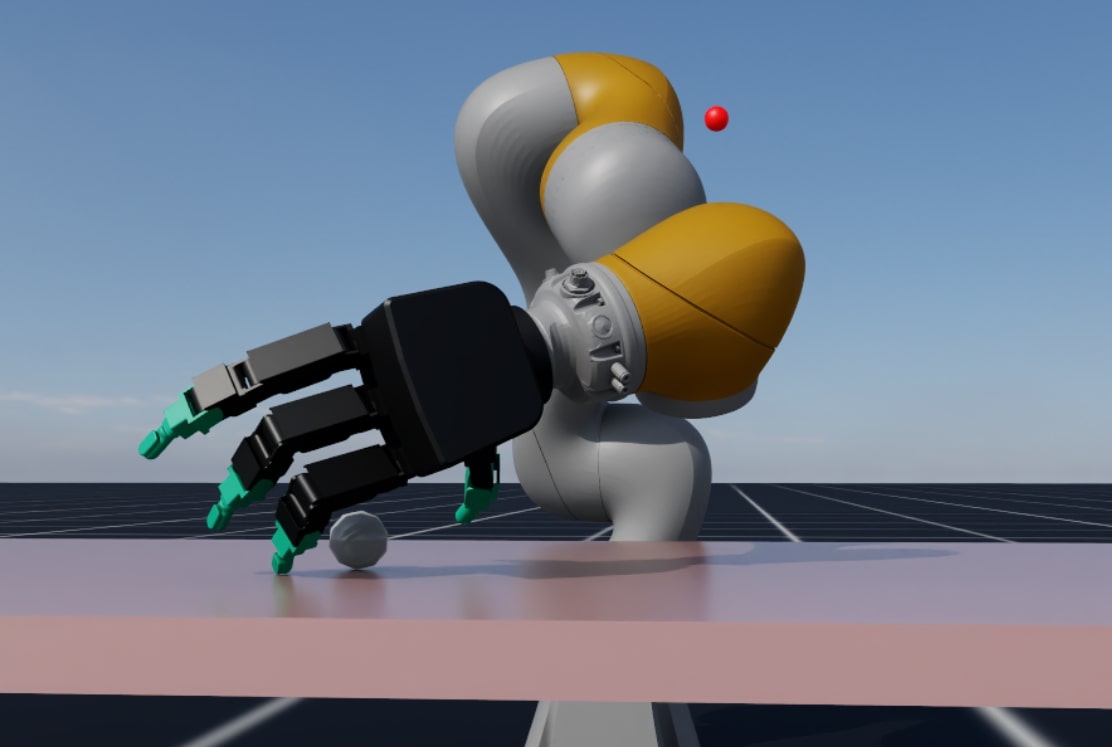
|
将末端执行器移动到使用Franka机器人采样的目标姿势处 |
|
|
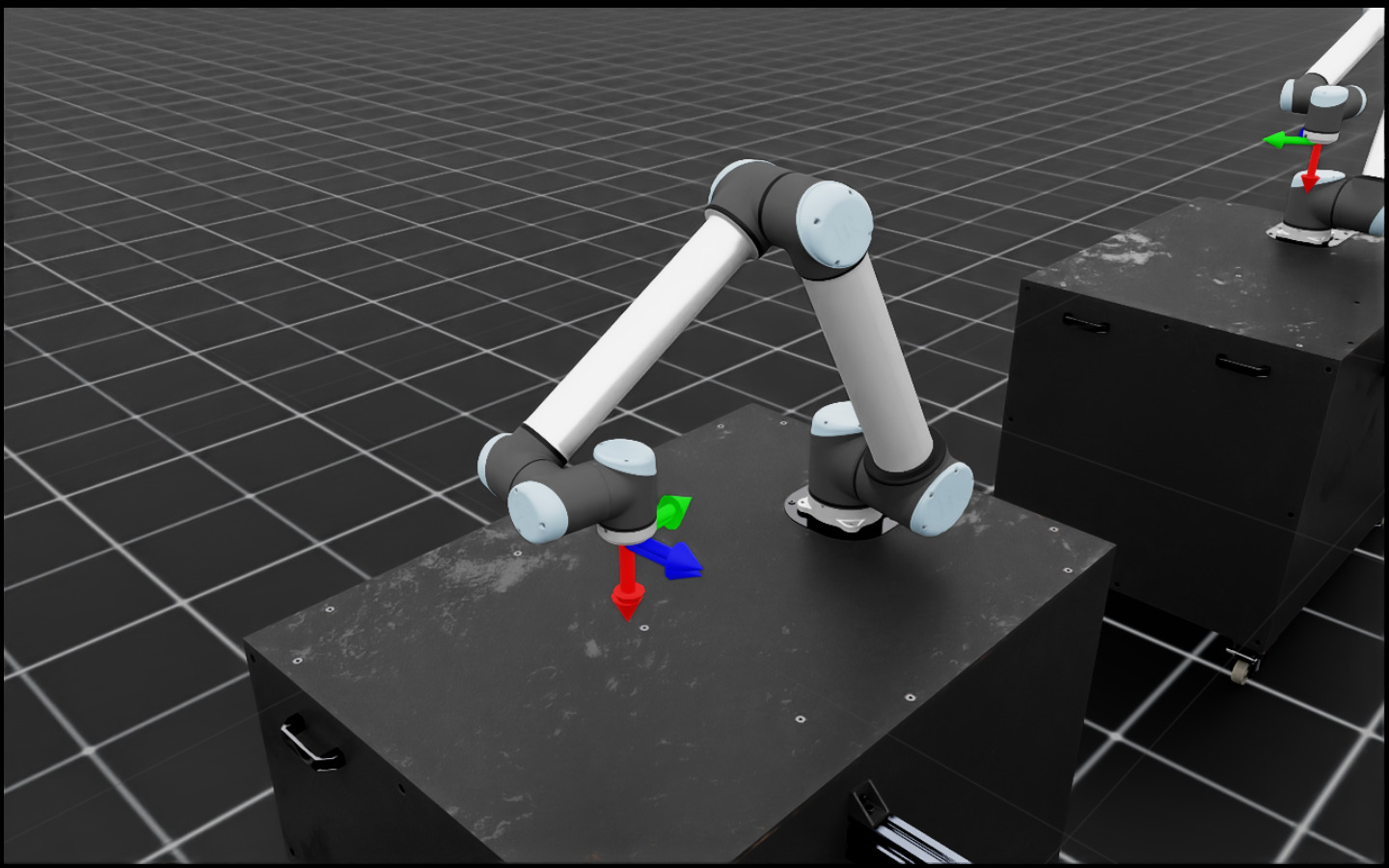
将末端执行器移动到使用 UR10 机器人采样的目标姿势 |
|
|
使用 UR10e 机器人将末端执行器移动到采样的目标位姿。此策略已部署到真实机器人上 |
|
|
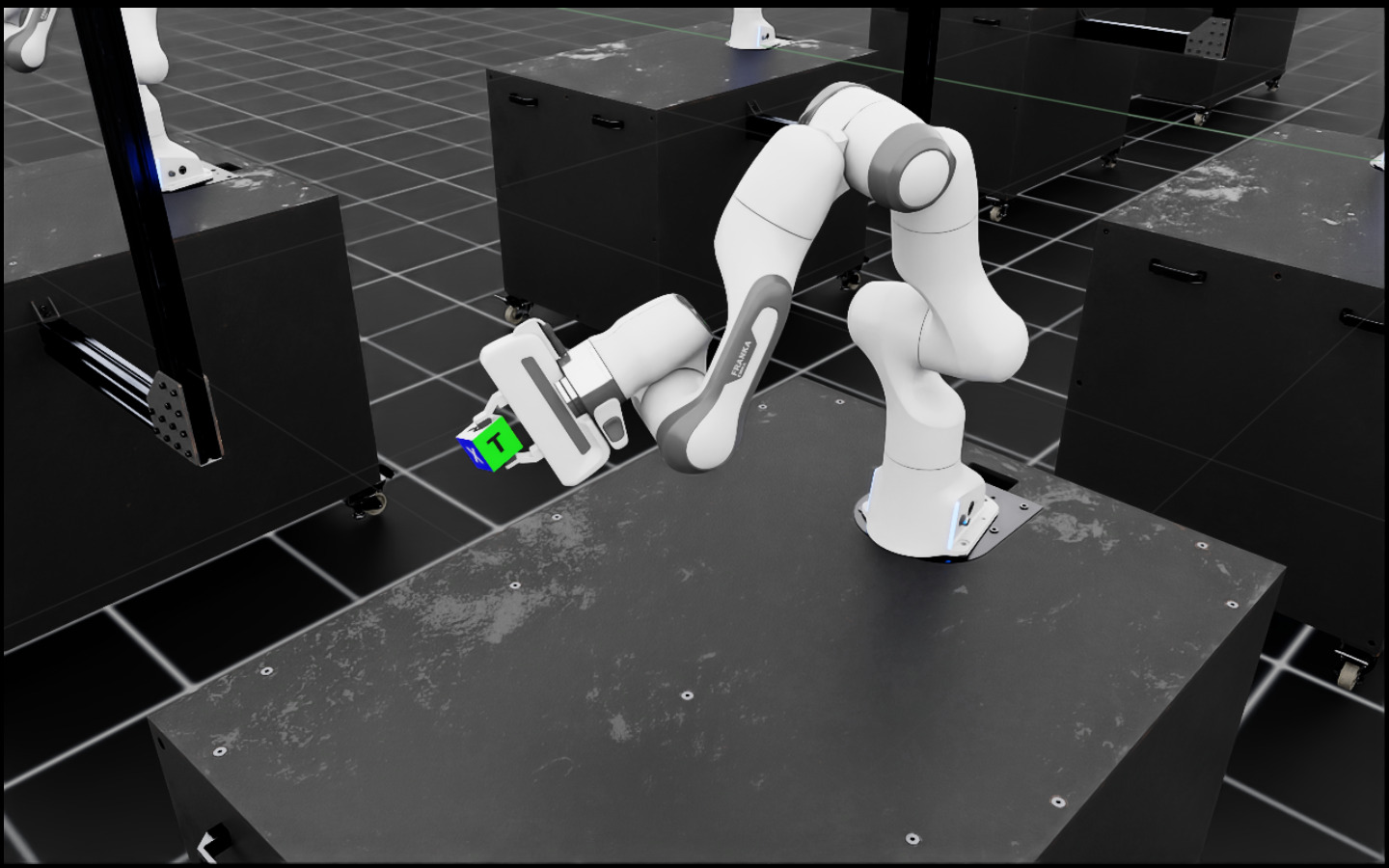
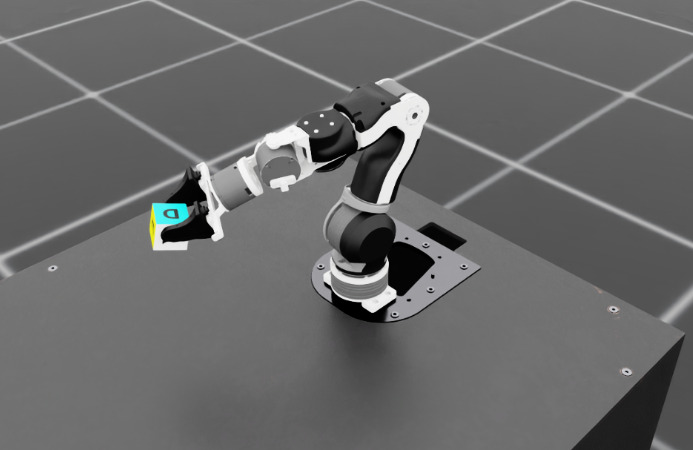
选择一个立方体,并将其带到采样目标位置,使用Franka机器人。 |
|
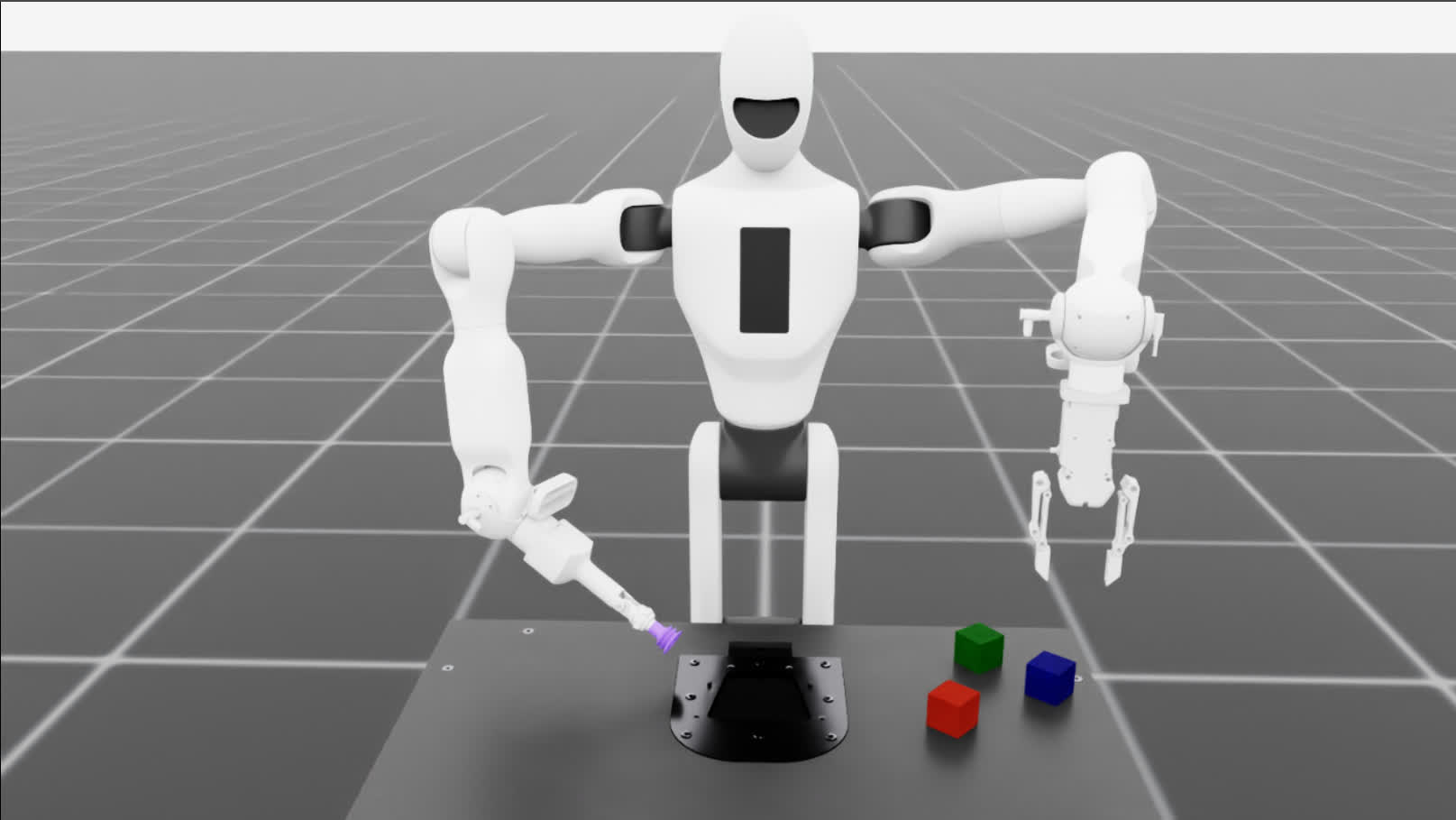
|
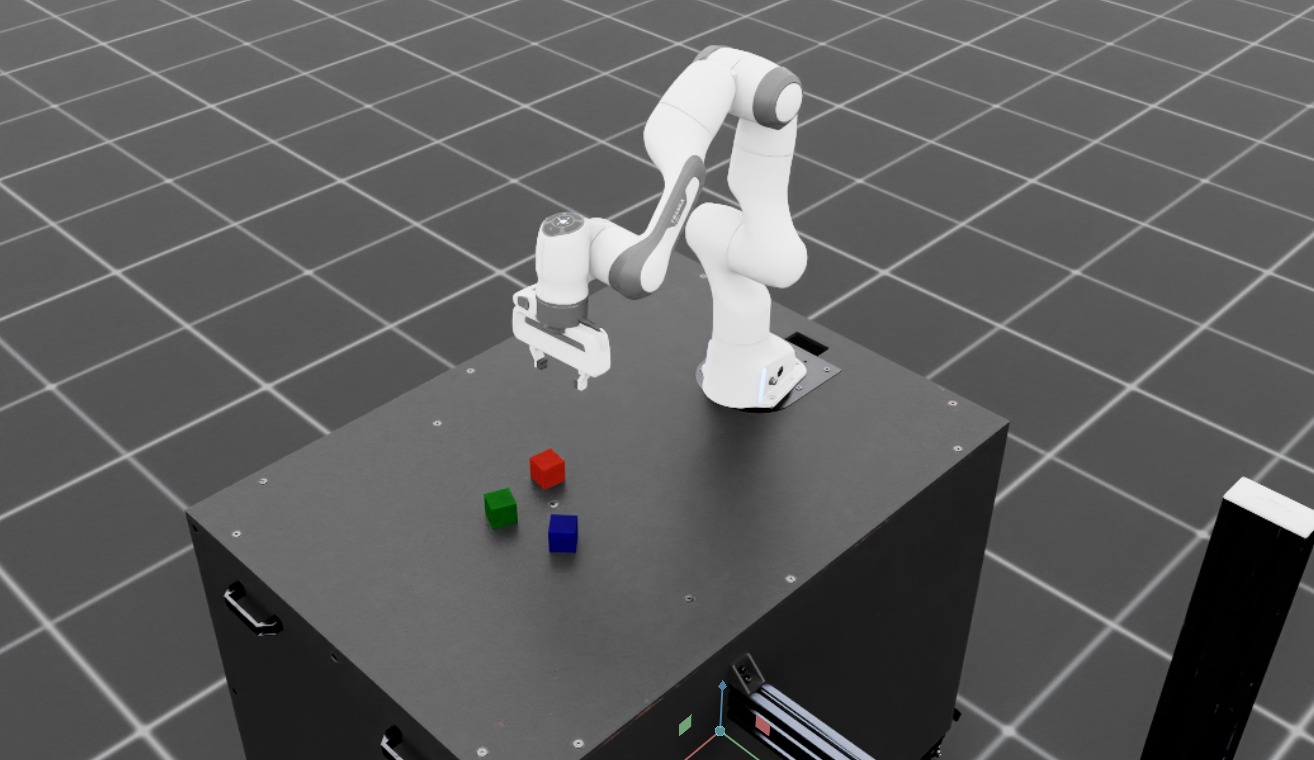
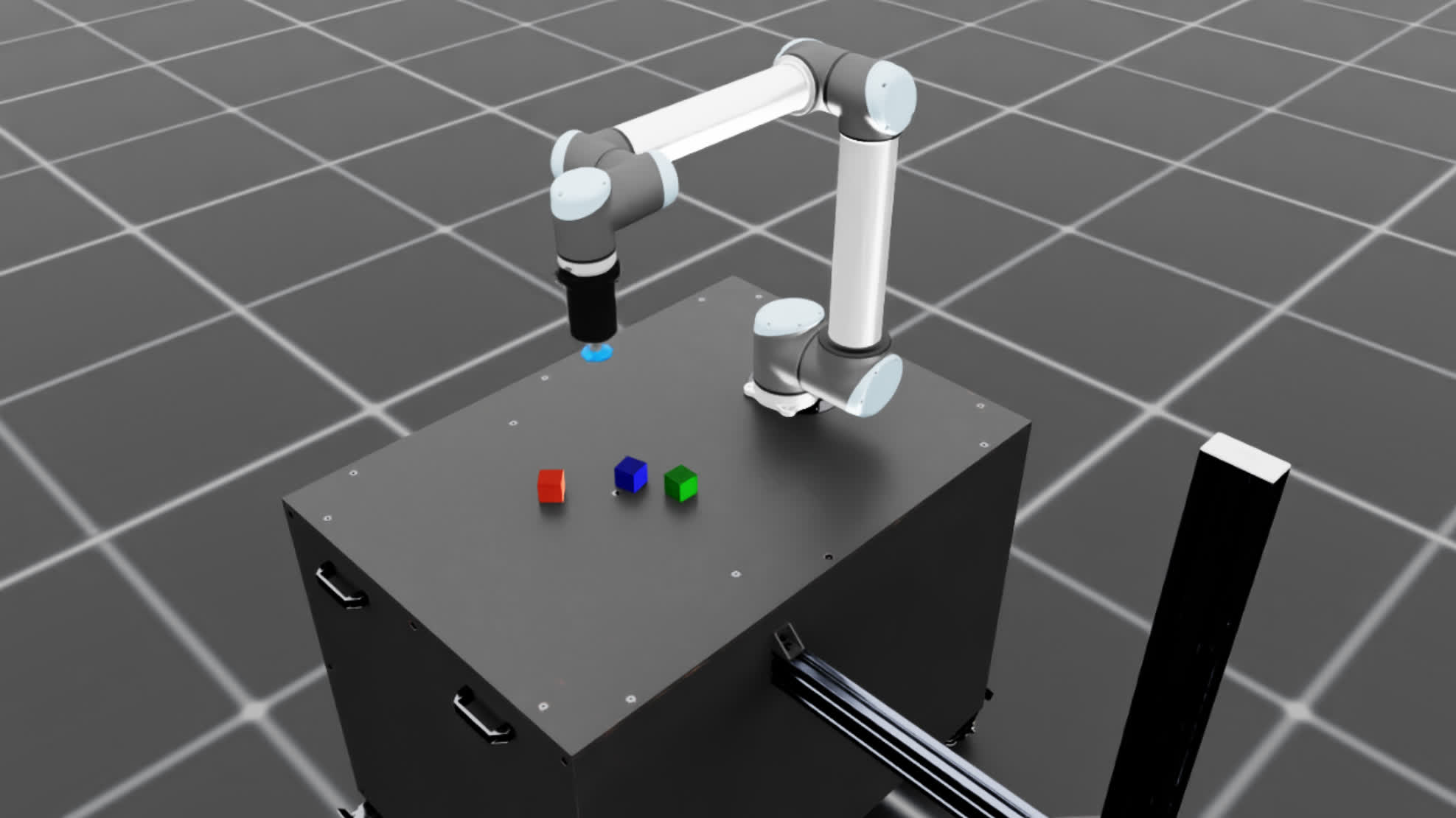
使用Franka机器人堆叠三个立方体(从底部到顶部: 蓝色,红色,绿色)。Blueprint env 用于 NVIDIA Isaac GR00T 蓝图,用于合成操纵运动生成 |
|
|
使用 UR10 机械臂和长表面夹持器或短表面夹持器将三个立方体(从底部到顶部依次为蓝色、红色、绿色)堆叠在一起。 |
|
|
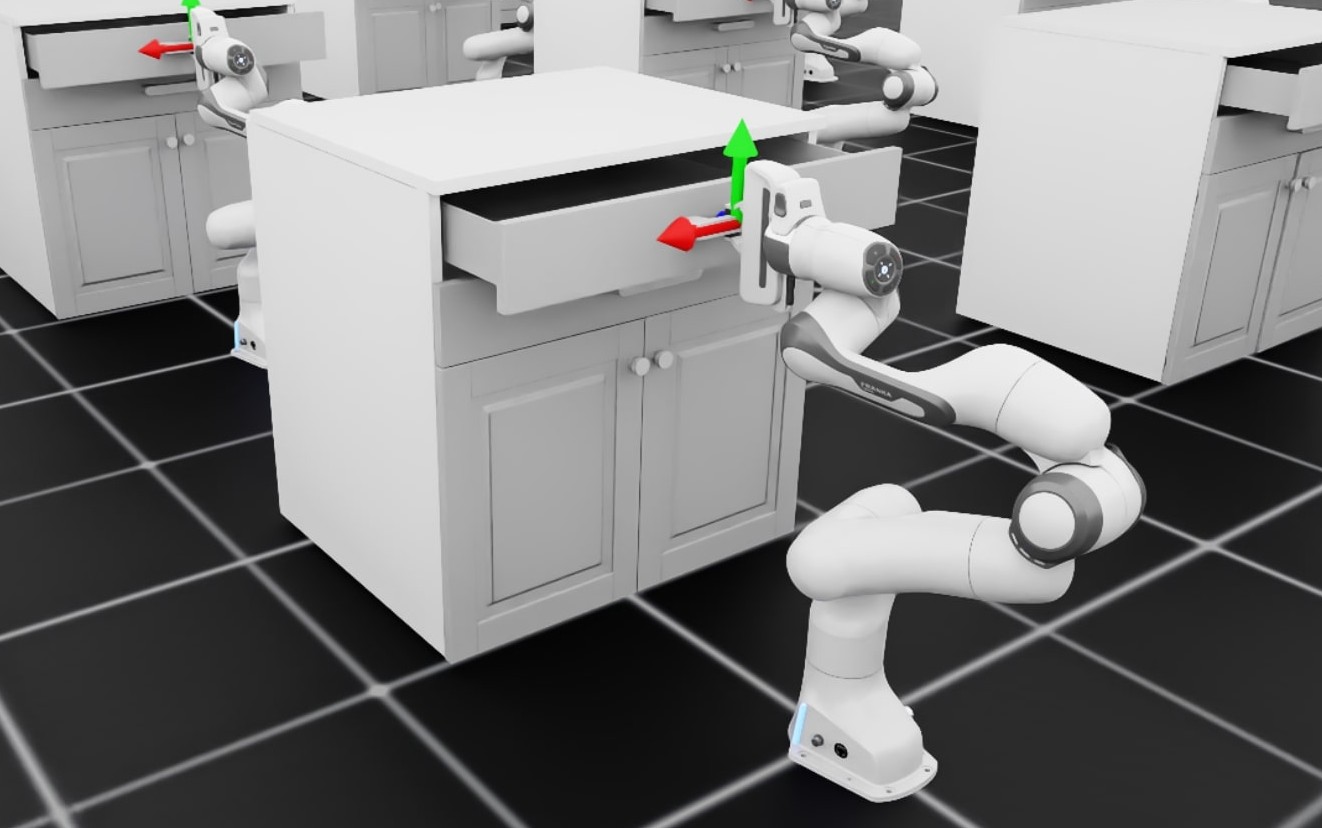
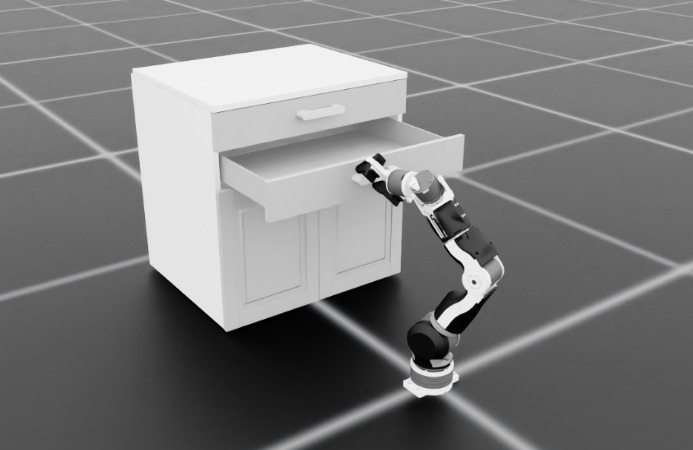
抓住一个柜子抽屉的把手,并用 Franka 机器人打开它。 |
|
|
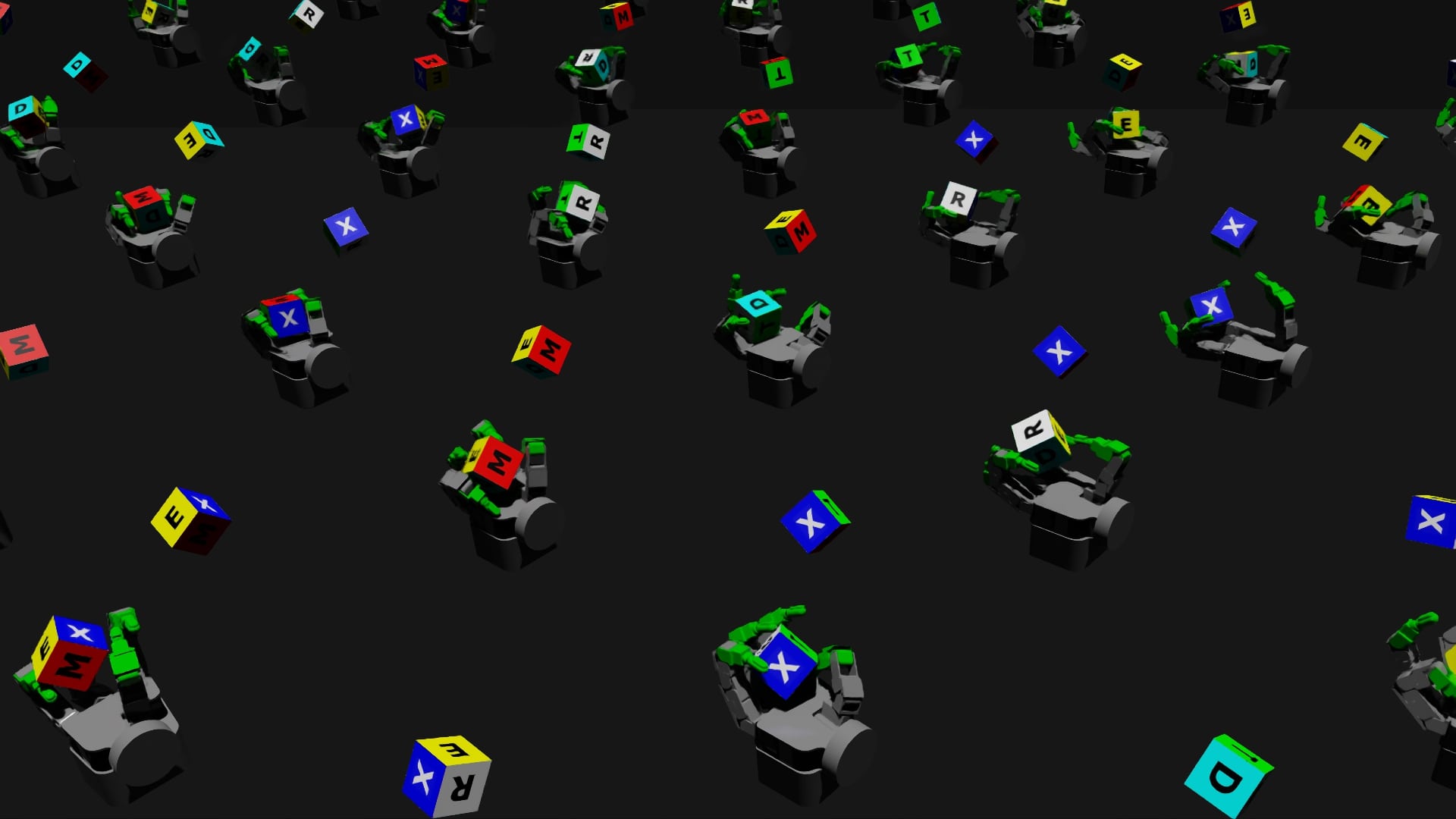
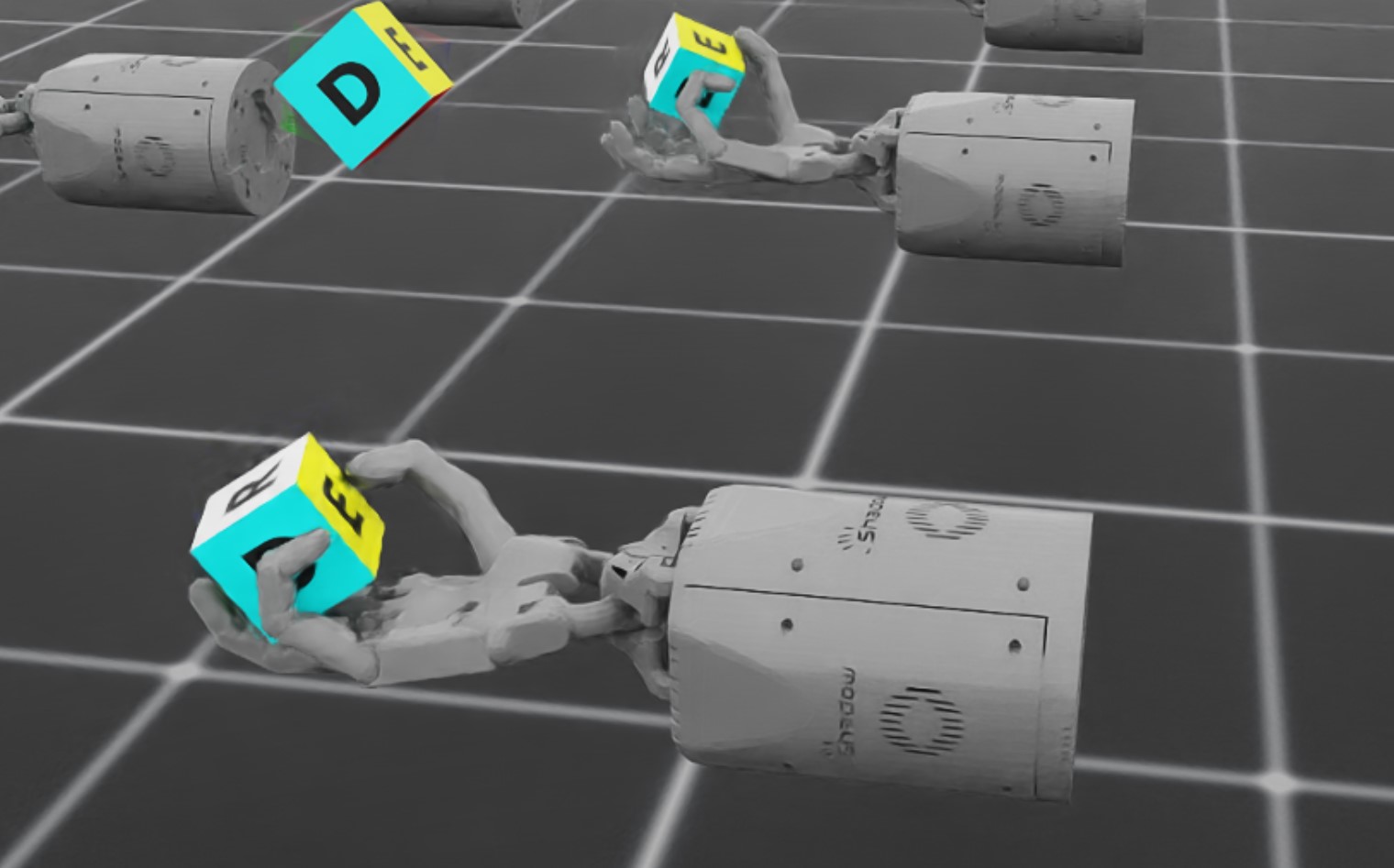
使用 Allegro 手进行魔方的手持重定向 |
|
|
Isaac-Repose-Cube-Shadow-Direct-v0 |
用影子手重定位立方体 |
|
手中立方体的重新定向,使用 Shadow hand 和感知输入。需要使用 |
|
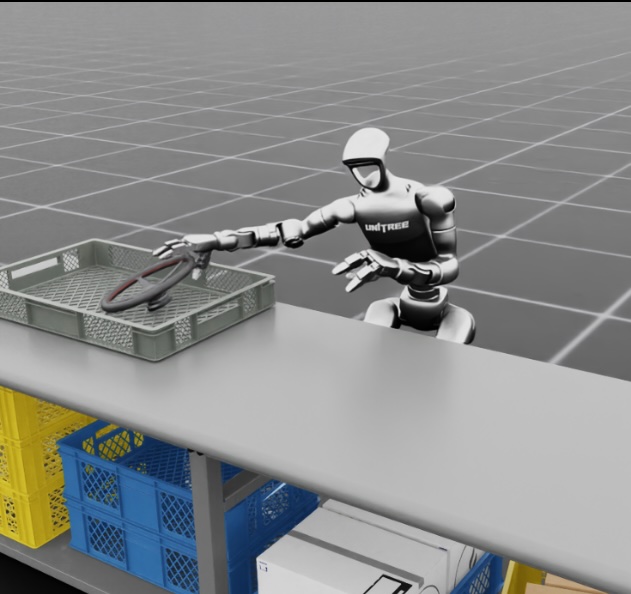
|
使用GR-1人形机器人将物体拾起并放入篮子 |
|
|
使用具有腰部自由度的 GR-1 人形机器人拾取物体并将其放置在篮子中,从而提供更大的伸展空间。 |
|
|
使用 Unitree G1 人形机器人拾取物体并放入篮子 |
|
|
使用配备三指手的 Unitree G1 人形机器人拾取物体并放入篮子。机器人基座固定在原位。 |
|
|
使用配备三指手的 Unitree G1 人形机器人拾取物体并放入篮子,启用原地运动操作能力(即机器人下半身原地平衡,而上半身通过逆运动学控制)。 |
|
|
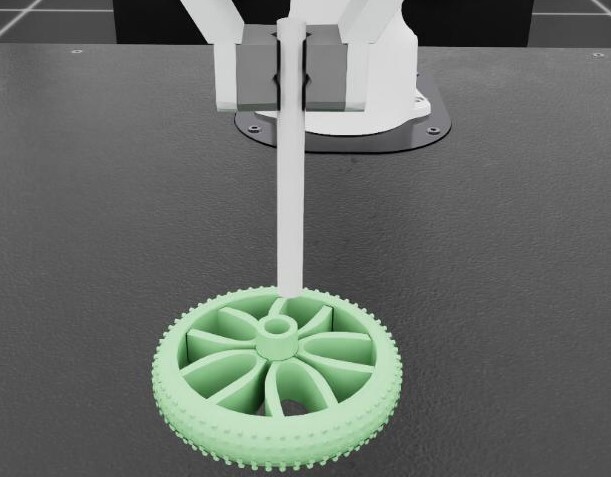
将桌子上的原始形状拾起并提升到目标位置 |
|
|
将桌子上的原始形状拾起并定位到目标姿势 |
|
|
使用 Galbot 类人机器人的左臂将三个立方体(从底部到顶部依次为蓝色、红色、绿色)堆叠在一起。 |
|
|
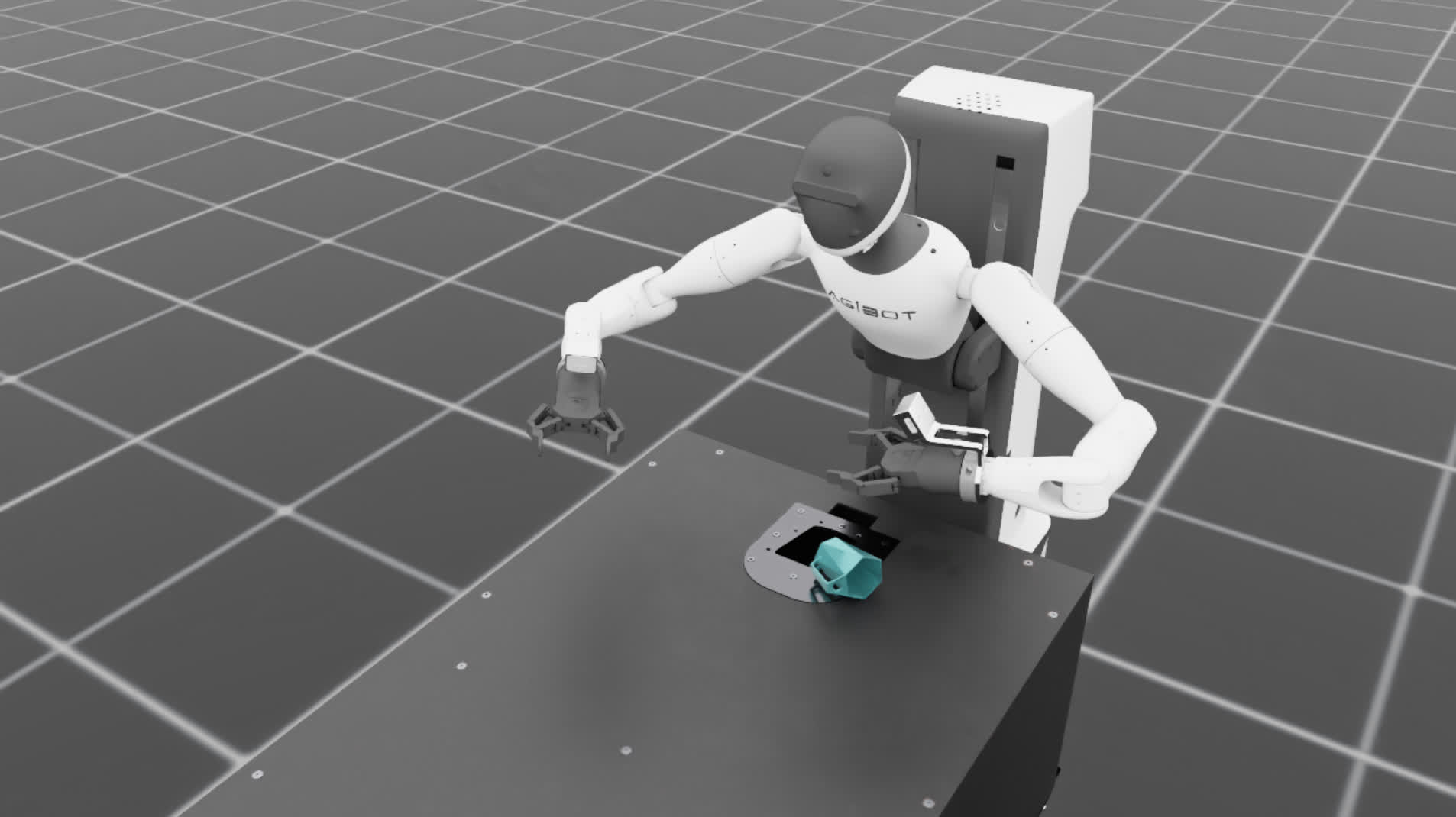
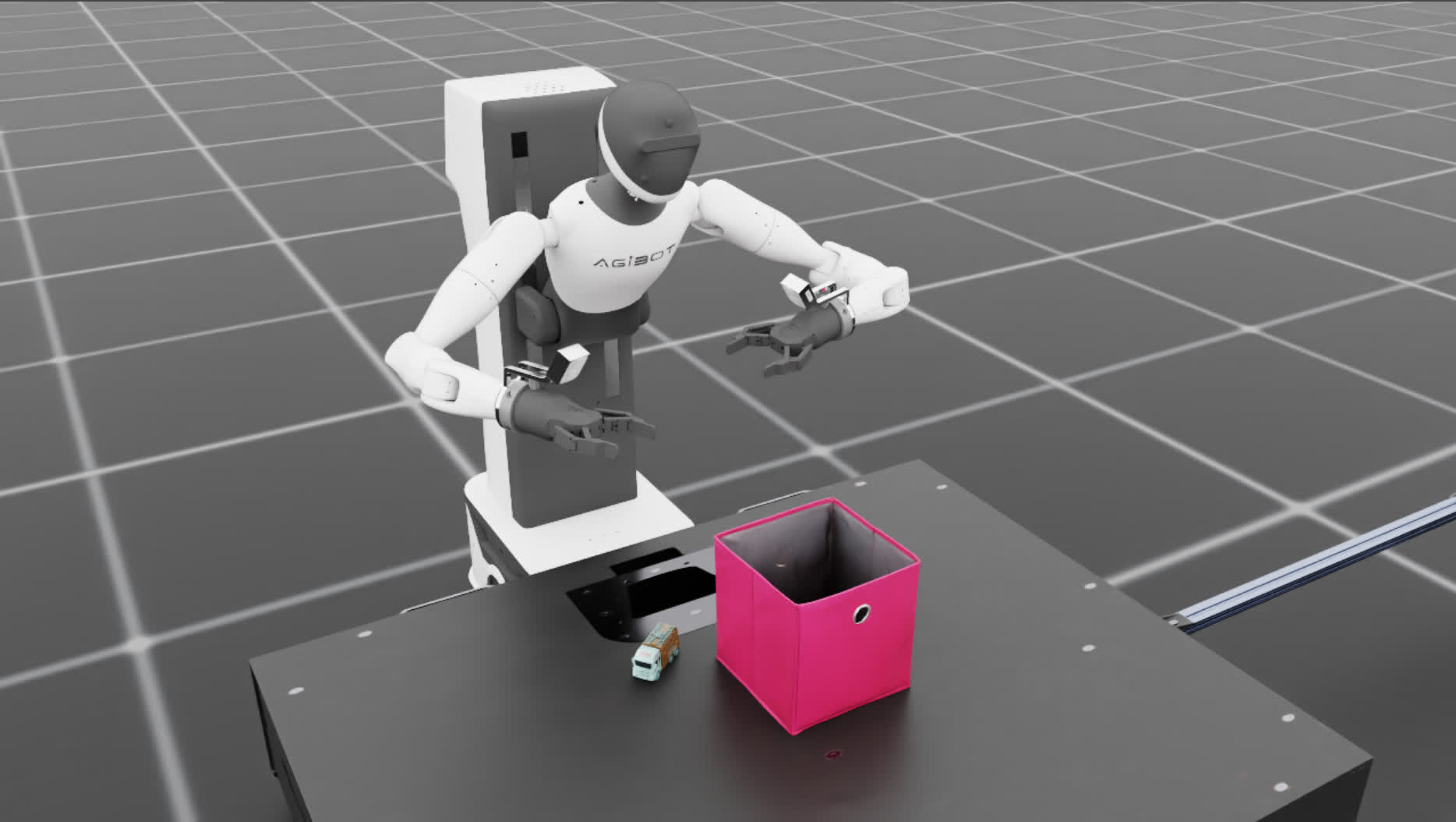
使用Agibot A2D人形机器人将物体拾起并放入篮子 |
|
|
使用Agibot A2D人形机器人将物体拾起并放入篮子 |
|
|
使用OpenArm机器人将末端执行器移动到采样的目标位姿 |
|
|
使用OpenArm机器人将末端执行器移动到采样的目标位姿 |
|
|
使用OpenArm机器人拾取一个立方体并将其移动到采样的目标位置 |
|
|
使用OpenArm机器人抓住柜子抽屉的把手并打开它 |
富接触操控#
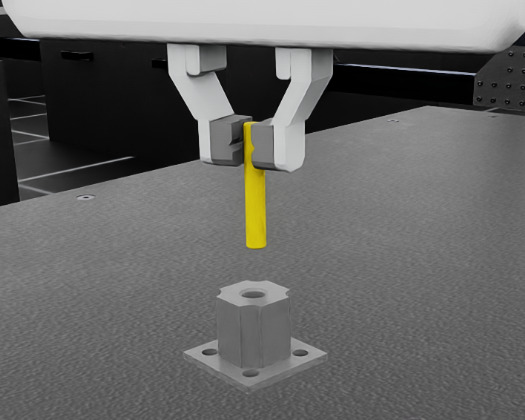
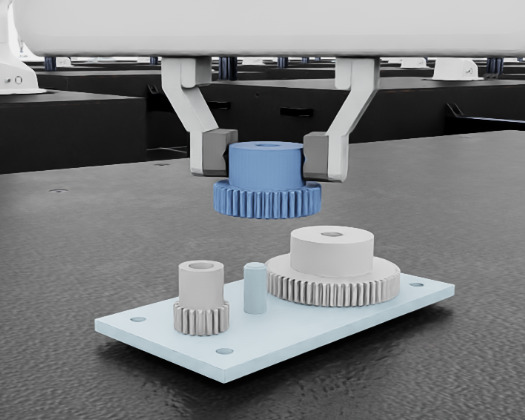
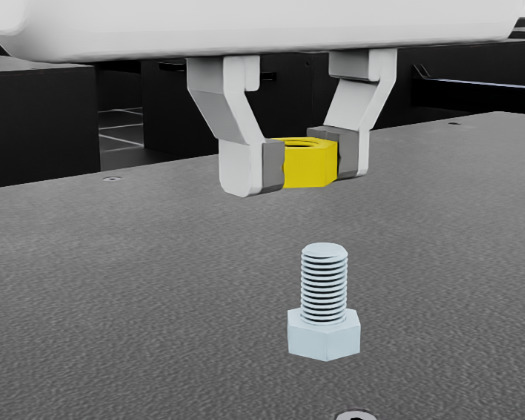
基于富接触操控的环境,例如销钉插入、齿轮啮合和螺母螺栓紧固。
这些任务共享相同的任务配置和控制选项。您可以通过指定任务名称在它们之间切换。例如:
Isaac-Factory-PegInsert-Direct-v0: 使用Franka机械臂进行销钉插入
Isaac-Factory-GearMesh-Direct-v0: 与Franka机械臂啮合的齿轮
Isaac-Factory-NutThread-Direct-v0: 用Franka机械臂进行螺母螺栓紧固
世界 |
环境 ID |
描述 |
|---|---|---|
|
将销钉插入Franka机器人的插座 |
|
|
将齿轮插入并与其他齿轮在基座上进行网格连接,使用Franka机器人。 |
|
|
在Franka机器人上,将螺母螺纹到螺栓的前两个螺纹上。 |
自动装配#
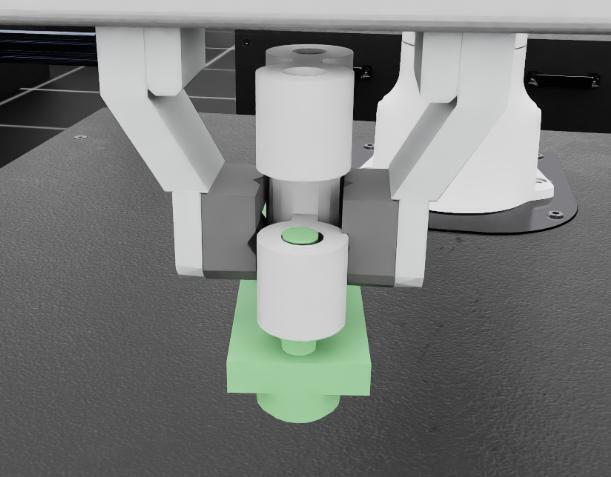
基于100种不同装配任务的环境,每个任务都涉及将插头插入插座的操作。这些任务共享相同的配置框架,但通过零部件的几何形状和物理属性实现差异化。
可通过指定对应的资产ID切换不同任务,可用资产ID包括:
'00004', '00007', '00014', '00015', '00016', '00021', '00028', '00030', '00032', '00042', '00062', '00074', '00077', '00078', '00081', '00083', '00103', '00110', '00117', '00133', '00138', '00141', '00143', '00163', '00175', '00186', '00187', '00190', '00192', '00210', '00211', '00213', '00255', '00256', '00271', '00293', '00296', '00301', '00308', '00318', '00319', '00320', '00329', '00340', '00345', '00346', '00360', '00388', '00410', '00417', '00422', '00426', '00437', '00444', '00446', '00470', '00471', '00480', '00486', '00499', '00506', '00514', '00537', '00553', '00559', '00581', '00597', '00614', '00615', '00638', '00648', '00649', '00652', '00659', '00681', '00686', '00700', '00703', '00726', '00731', '00741', '00755', '00768', '00783', '00831', '00855', '00860', '00863', '01026', '01029', '01036', '01041', '01053', '01079', '01092', '01102', '01125', '01129', '01132', '01136'.
我们同时提供拆卸与装配两种任务环境。
注意
建议使用 CUDA 与 570 驱动程序运行 AutoMate 环境。如果在架构为 x86_64 的 Linux 上使用 Nvidia 驱动程序 570 运行,我们按照以下步骤安装 CUDA 12.8。这允许在 AutoMate 环境中使用 CUDA 计算奖励。如果您有不同的操作系统或架构,请参阅 CUDA installation page 获取其他说明。
wget https://developer.download.nvidia.com/compute/cuda/12.8.0/local_installers/cuda_12.8.0_570.86.10_linux.run
sudo sh cuda_12.8.0_570.86.10_linux.run --toolkit
使用 conda 时,可以通过以下命令安装 CUDA 工具包:
conda install cudatoolkit
使用 580 驱动程序和 CUDA 13,我们目前无法启用 CUDA 来计算奖励。代码会自动回退到 CPU,导致性能略慢。
Isaac-AutoMate-Disassembly-Direct-v0: 初始状态下插头已插入插座,底层控制器会将插头拔出并移至随机位置。这个过程完全由脚本控制,不涉及任何学习策略,因此不需要进行策略训练或评估。这些结果轨迹可作为逆向学习(即装配学习)的示范数据。运行指定任务的拆卸模式:
python source/isaaclab_tasks/isaaclab_tasks/direct/automate/run_disassembly_w_id.py --assembly_id=ASSEMBLY_ID --disassembly_dir=DISASSEMBLY_DIR. 所有生成的轨迹存储在本地文件夹DISASSEMBLY_DIR中。Isaac-AutoMate-Assembly-Direct-v0: 目标是将插头插入插座。你可以使用这个环境通过强化学习训练策略,或评估预训练模型。
要训练装配策略,我们运行命令
python source/isaaclab_tasks/isaaclab_tasks/direct/automate/run_w_id.py --assembly_id=ASSEMBLY_ID --train。我们可以通过可选参数自定义训练流程: 使用--headless以无界面模式运行(不打开GUI窗口),--max_iterations=MAX_ITERATIONS设置训练迭代次数,--num_envs=NUM_ENVS设置训练时的并行环境数量,--seed=SEED指定随机种子。训练过程中,策略检查点会自动保存在logs/rl_games/Assembly/test目录下。要评估一个装配策略,我们运行命令
python source/isaaclab_tasks/isaaclab_tasks/direct/automate/run_w_id.py --assembly_id=ASSEMBLY_ID --checkpoint=CHECKPOINT --log_eval。评估结果存储在evaluation_{ASSEMBLY_ID}.h5。
世界 |
环境 ID |
描述 |
|---|---|---|
|
用Franka机器人从插座中拔出插头 |
|
|
使用Franka机器人将插头插入相应的插座 |
FORGE#
FORGE 环境通过以下方式扩展了 Factory 环境:
力传感: 添加末端执行器所受力的观测值。
过度力惩罚: 添加一个选项来惩罚智能体超出接触力限制的行为。
动力学随机化: 随机化控制器增益、资产属性(摩擦、质量)和死区。
成功预测: 添加一个额外的动作来预测任务成功。
这些任务共享相同的任务配置和控制选项。您可以通过指定任务名称在它们之间切换。
Isaac-Forge-PegInsert-Direct-v0: 使用Franka机械臂进行销钉插入
Isaac-Forge-GearMesh-Direct-v0: 与Franka机械臂啮合的齿轮
Isaac-Forge-NutThread-Direct-v0: 用Franka机械臂进行螺母螺栓紧固
世界 |
环境 ID |
描述 |
|---|---|---|
|
将销钉插入Franka机器人的插座 |
|
|
将齿轮插入并与其他齿轮在基座上进行网格连接,使用Franka机器人。 |
|
|
在Franka机器人上,将螺母螺纹到螺栓的前两个螺纹上。 |
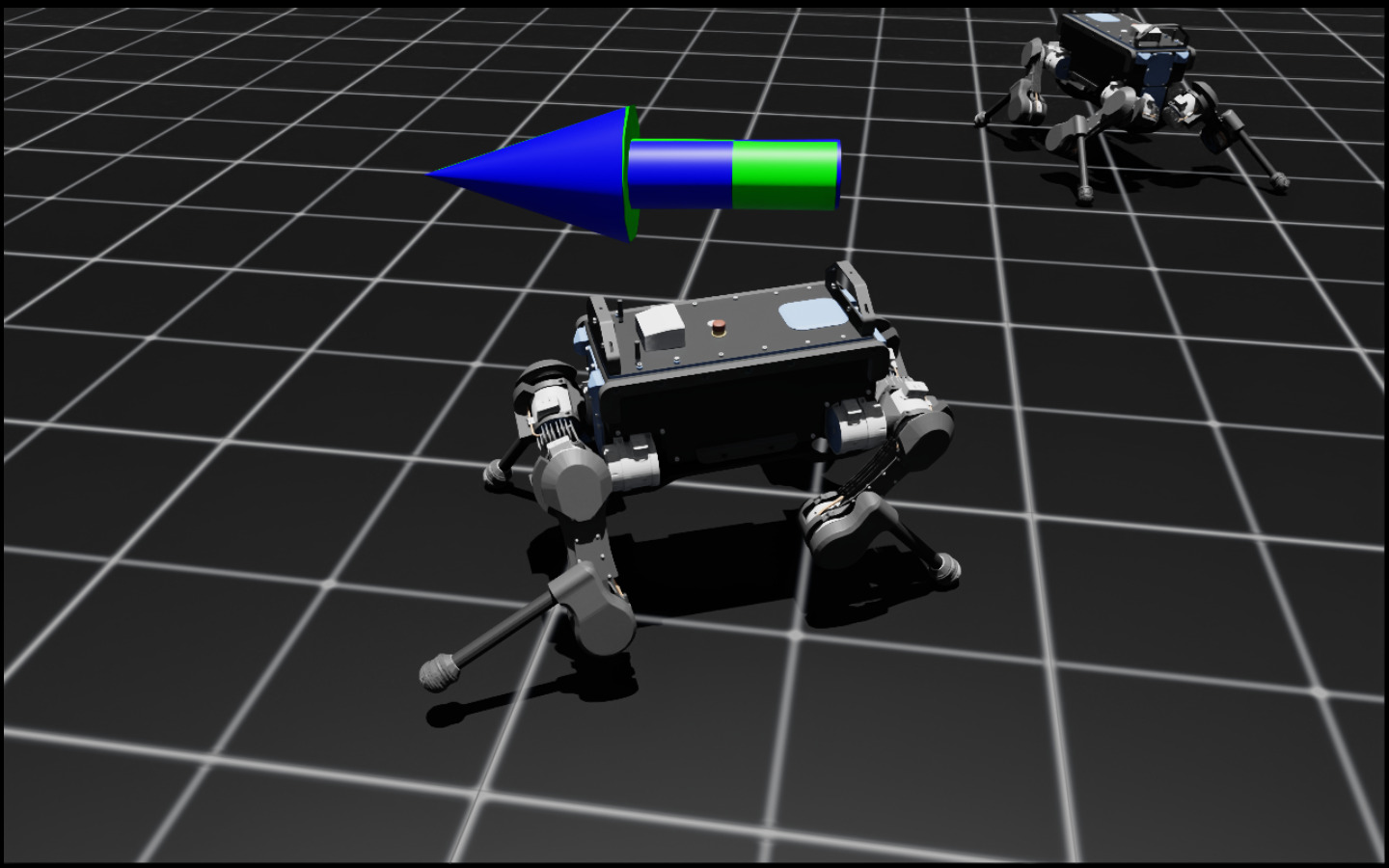
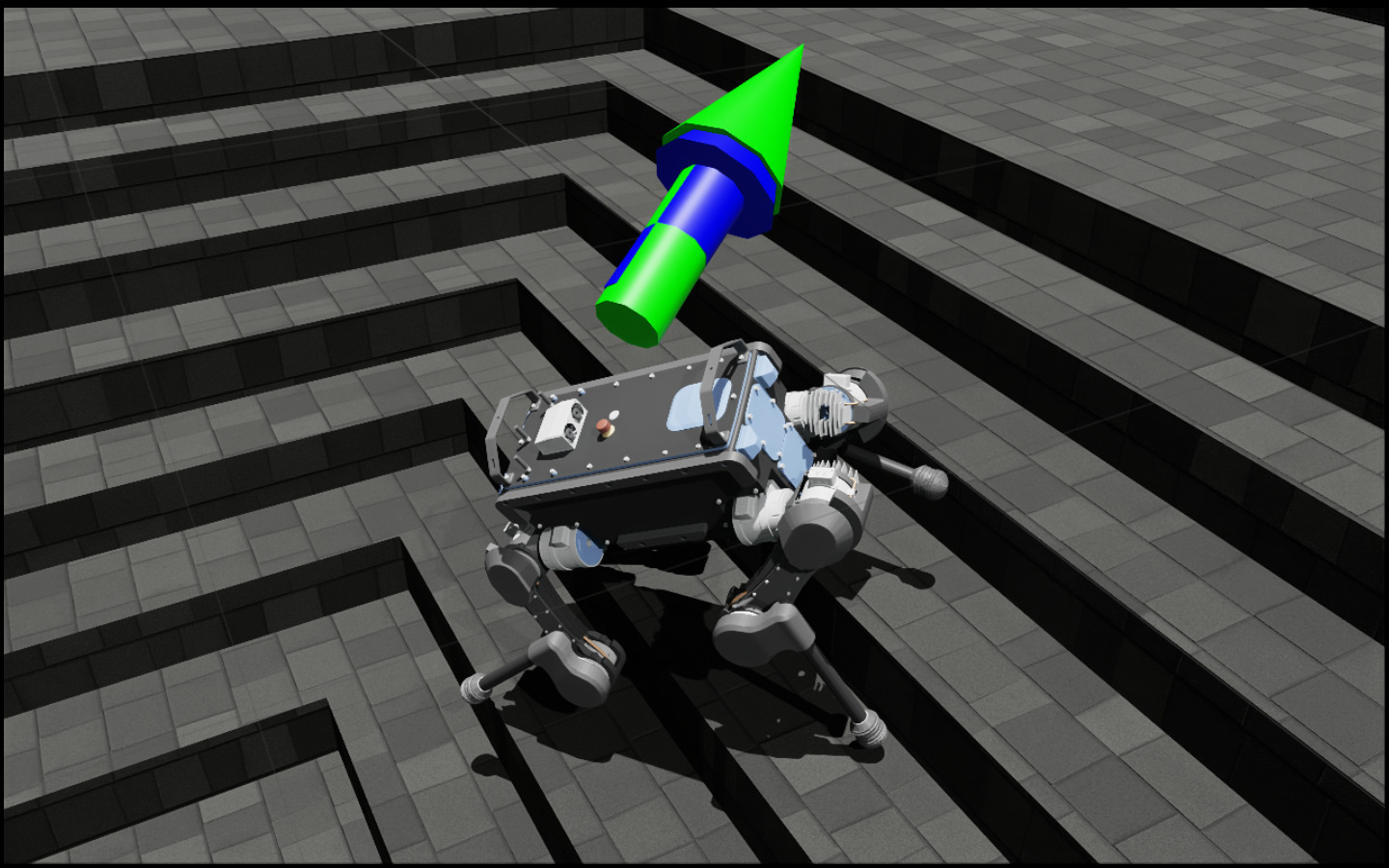
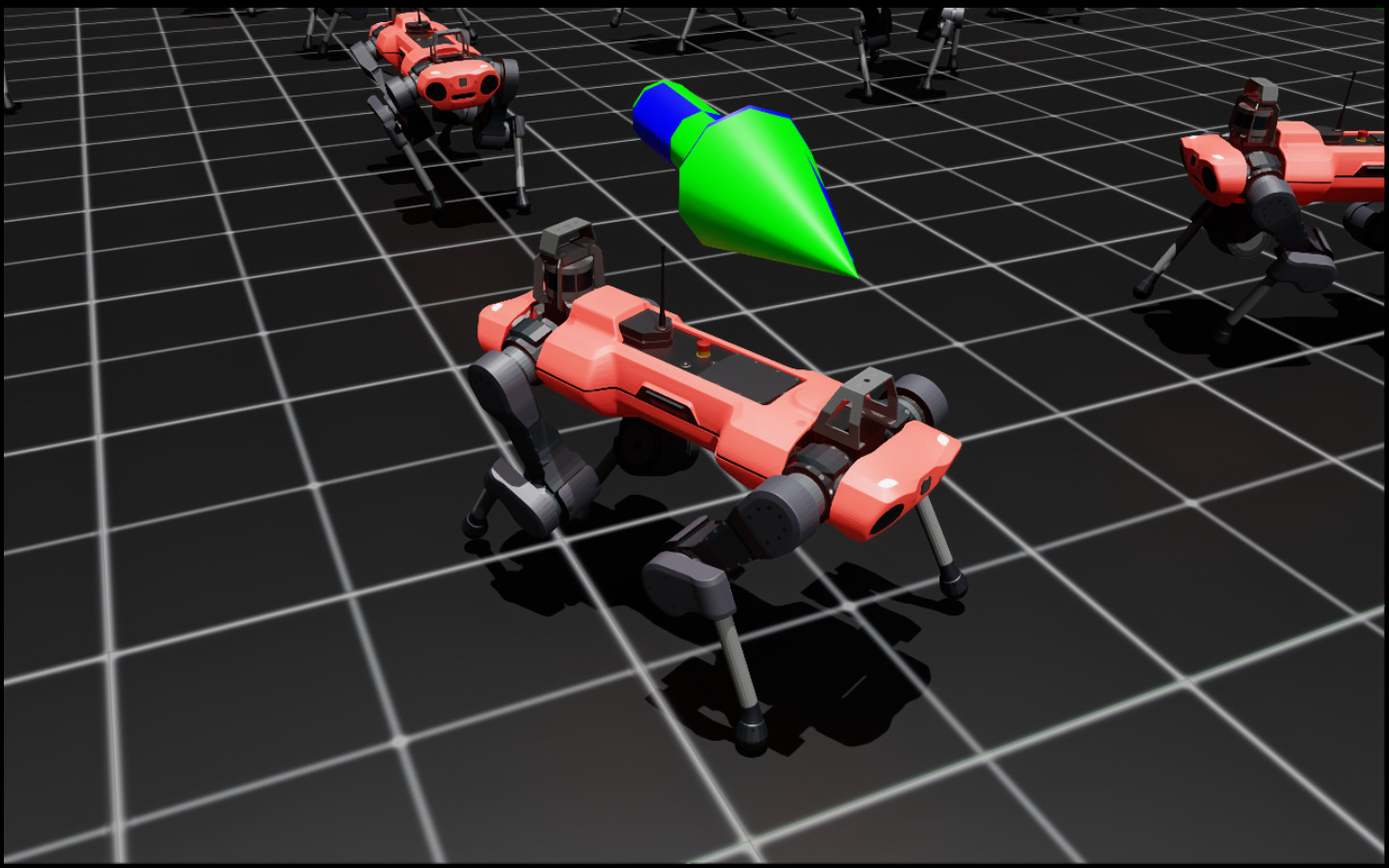
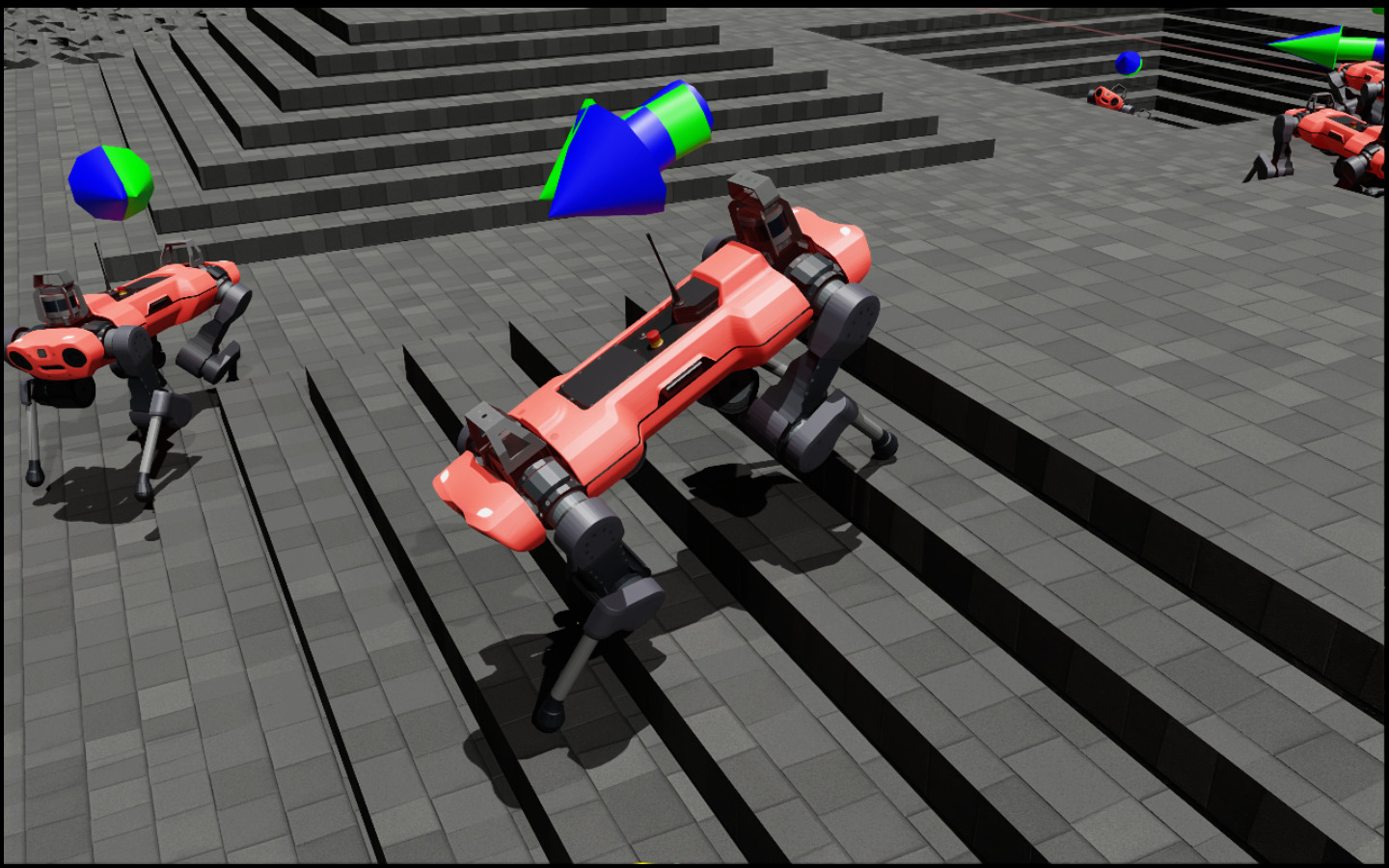
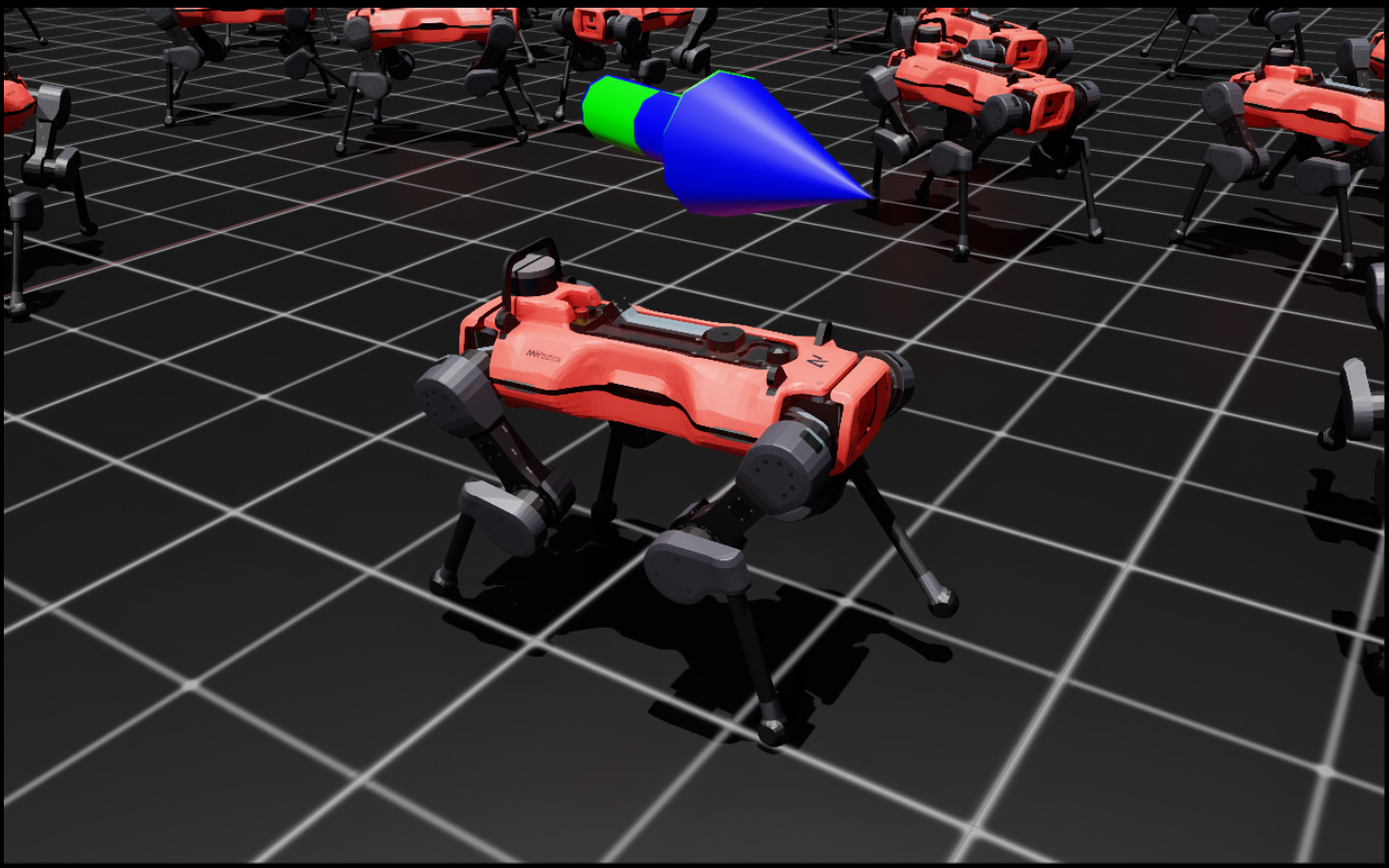
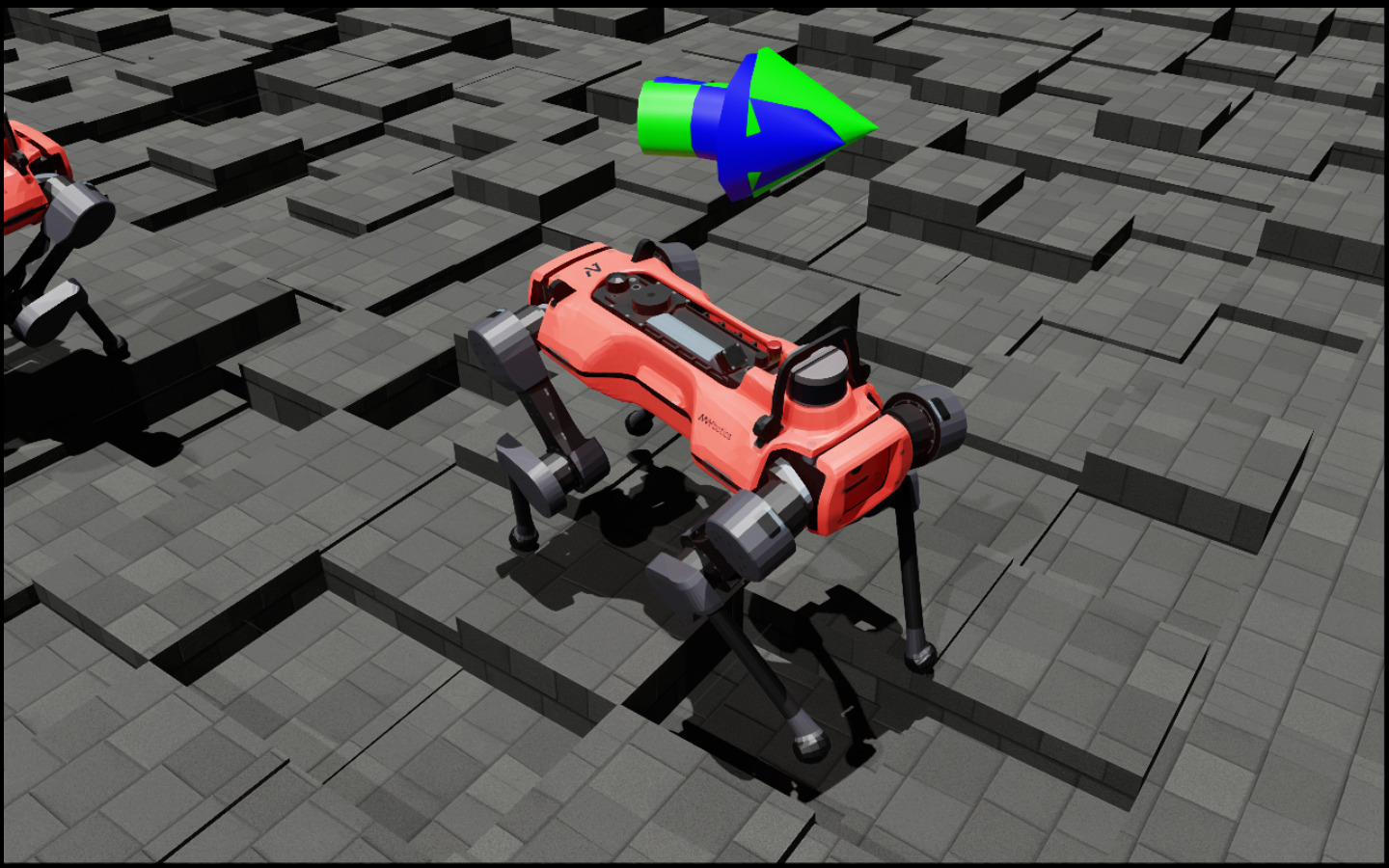
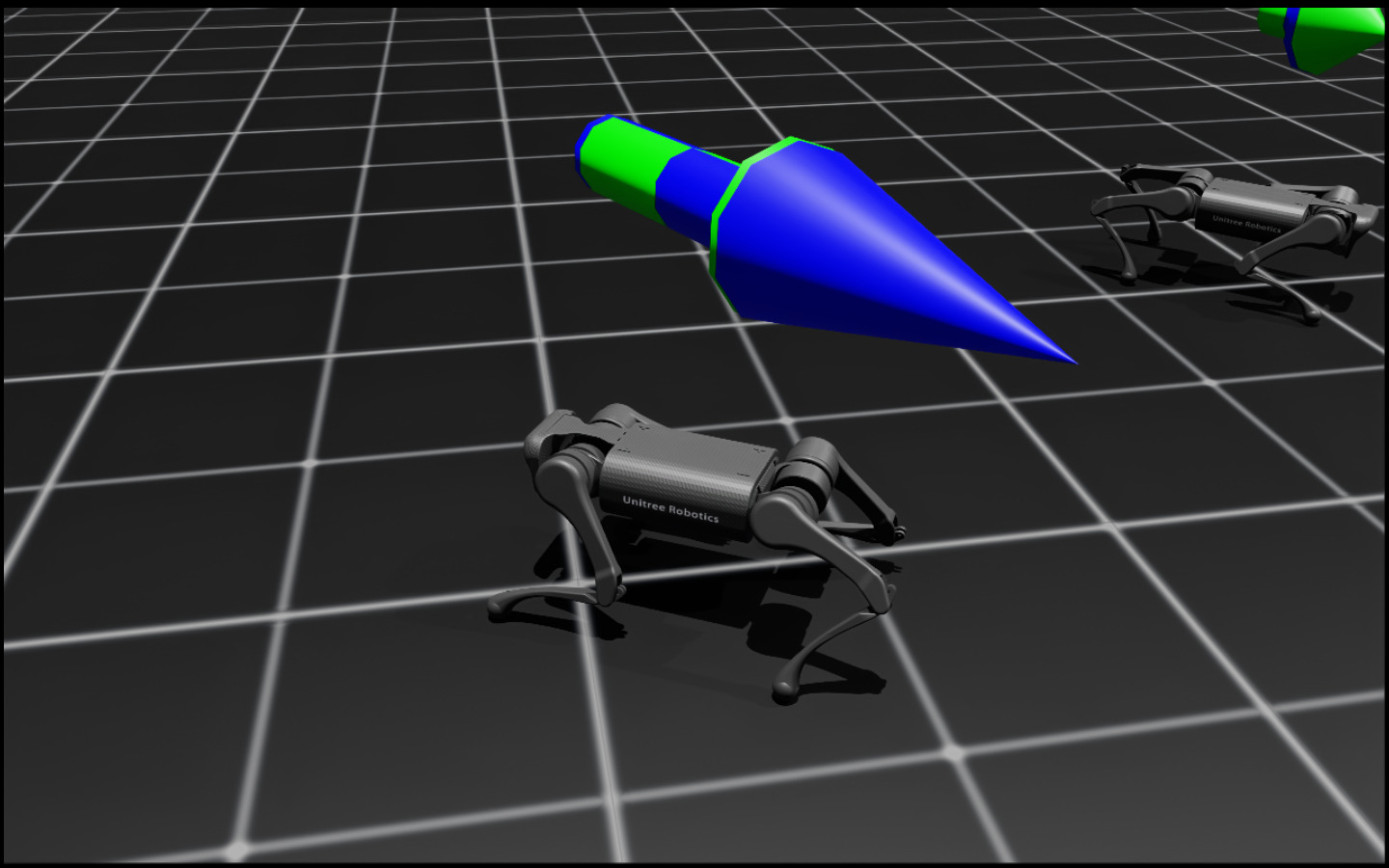
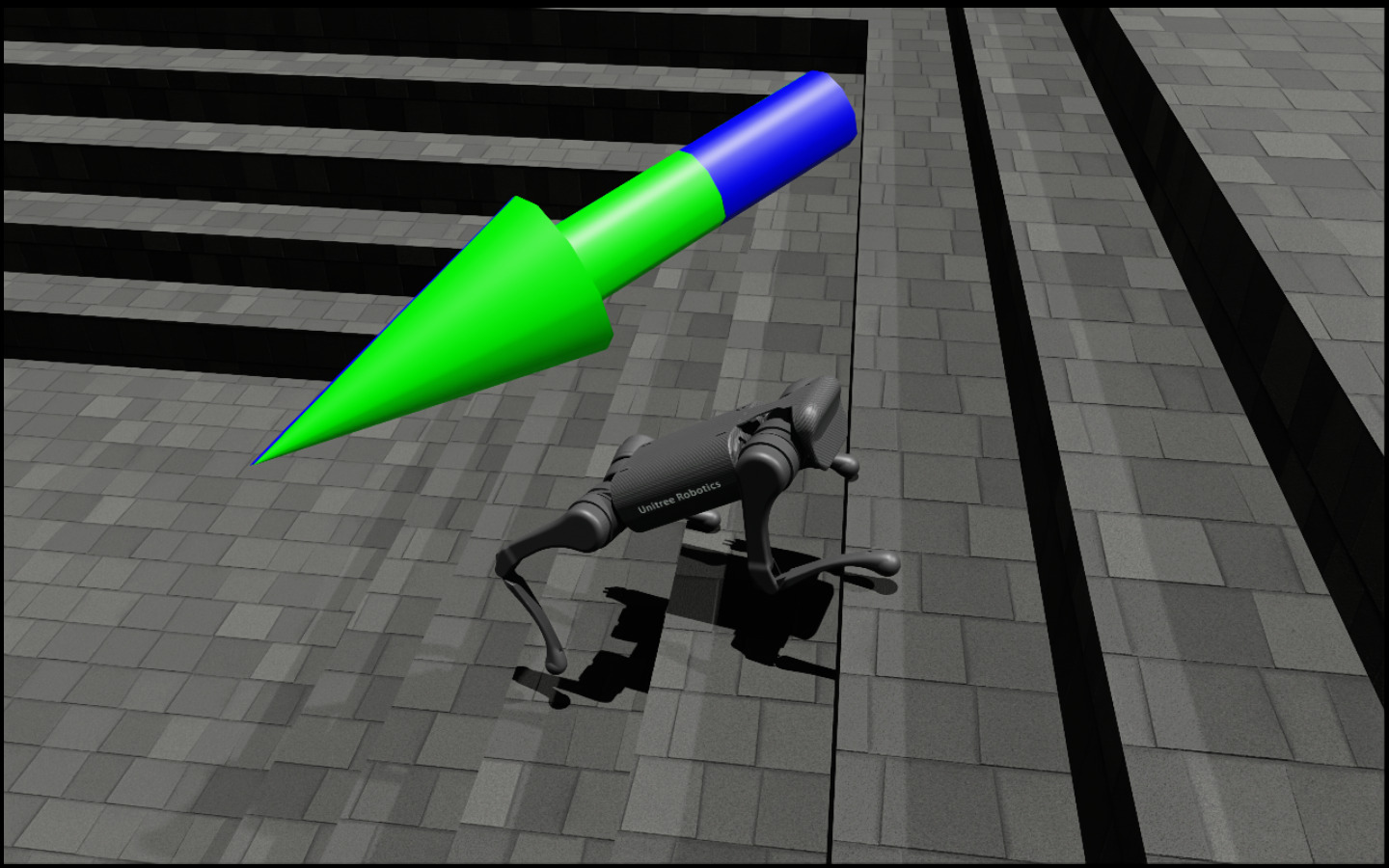
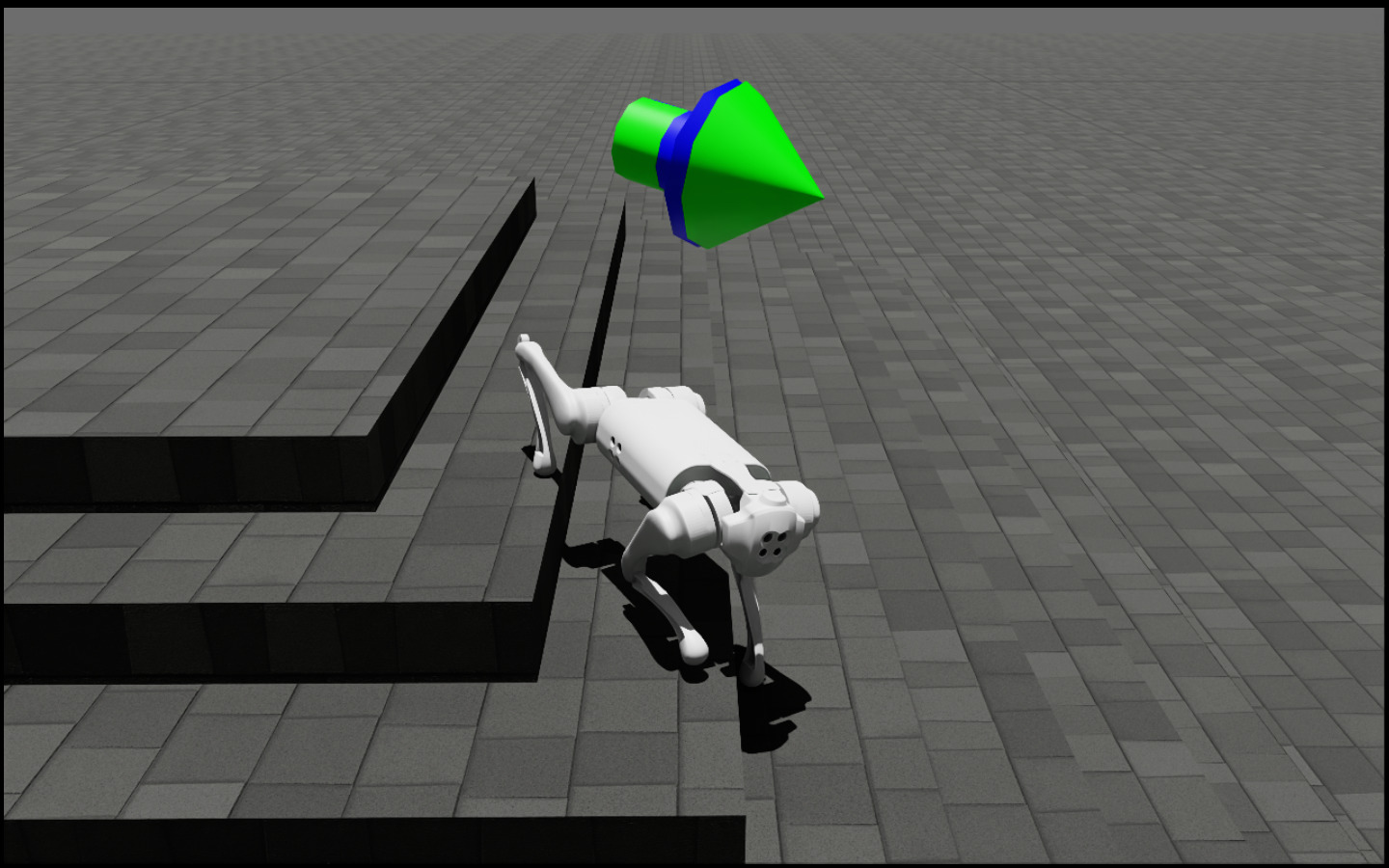
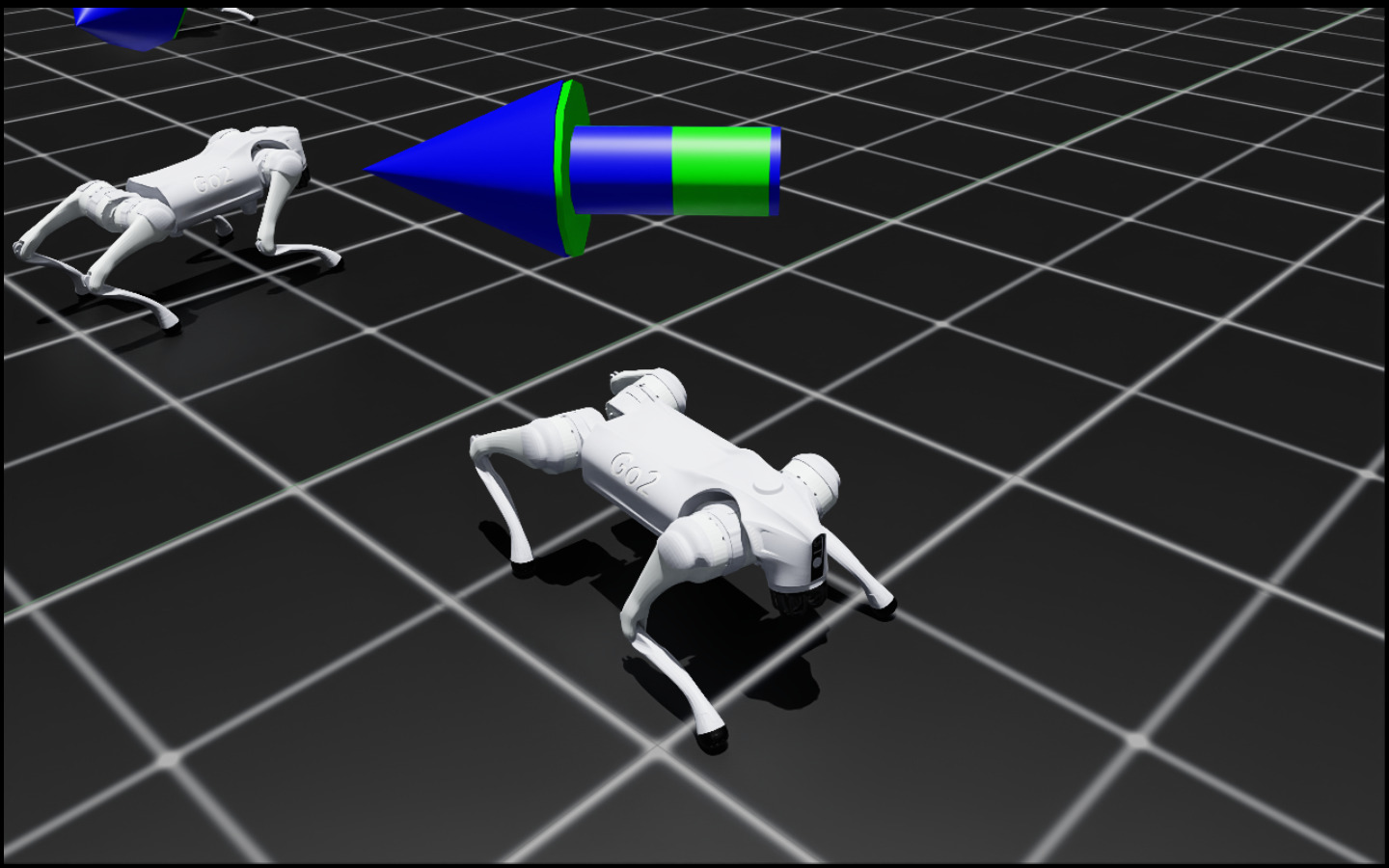
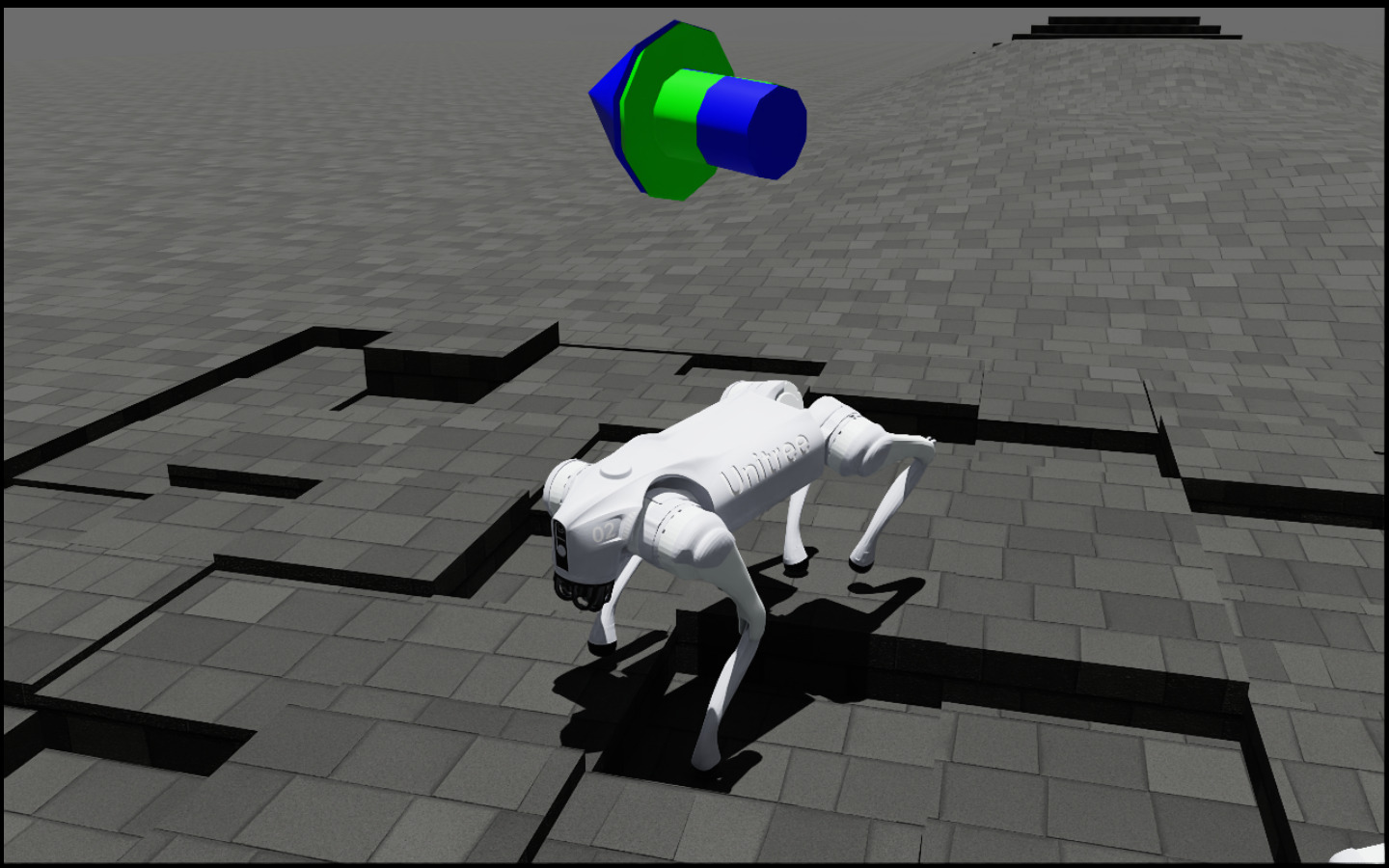
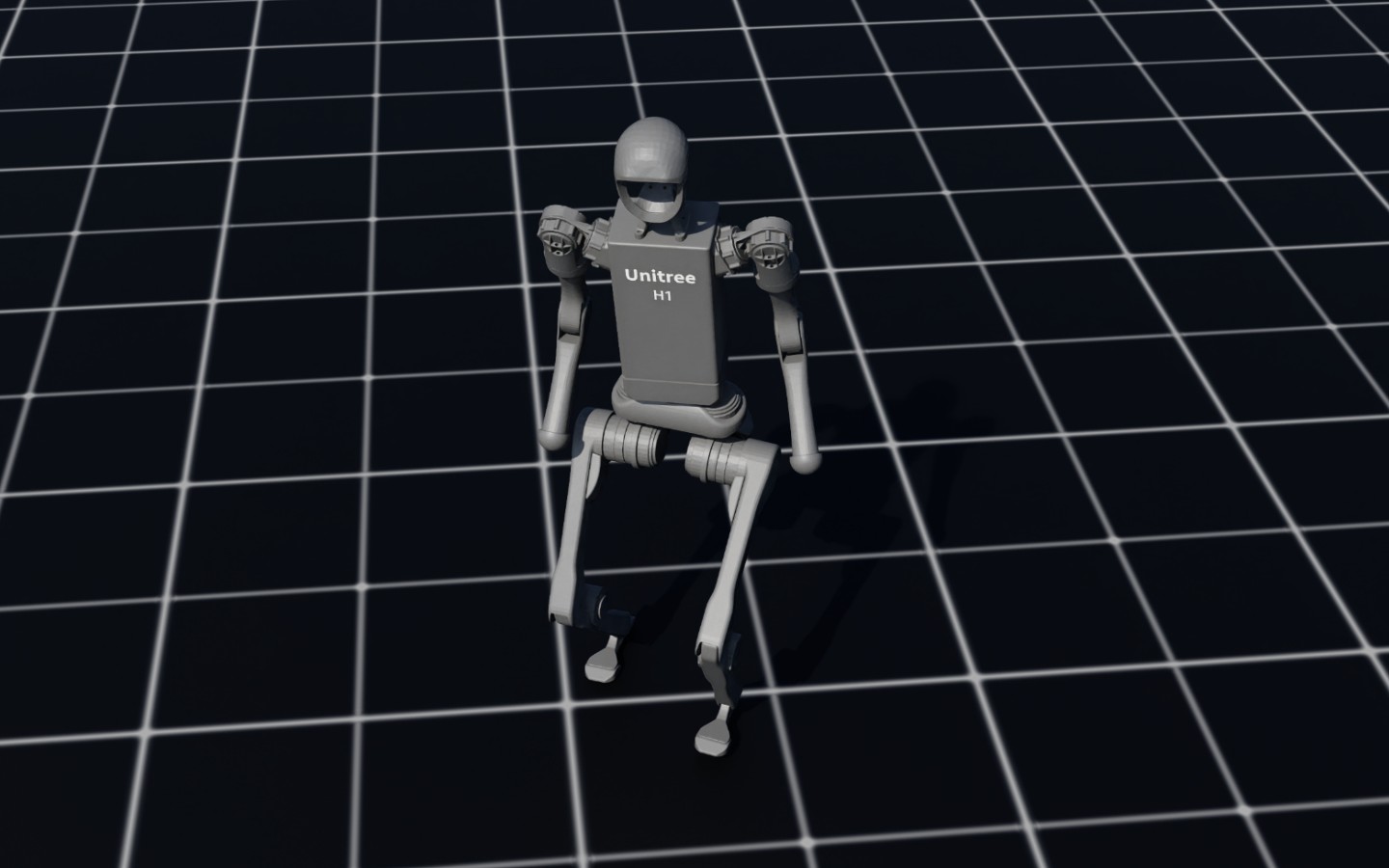
运动#
基于四足运动任务的环境。
世界 |
环境 ID |
描述 |
|---|---|---|
|
在平坦地形上使用 Anymal B 机器人跟踪速度指令 |
|
|
在崎岖地形上使用 Anymal B 机器人跟踪速度指令 |
|
|
在平坦地形上使用 Anymal C 机器人跟踪速度指令 |
|
|
在崎岖地形上追踪Anymal C机器人的速度指令 |
|
|
在平坦地形上使用 Anymal D 机器人跟踪速度命令 |
|
|
在粗糙地形上使用 Anymal D 机器人跟踪速度命令 |
|
|
在平坦地形上使用 Unitree A1 机器人跟踪速度指令 |
|
|
在崎岖地形上追踪Unitree A1机器人的速度指令 |
|
|
在平坦地形上追踪Unitree Go1机器人的速度指令 |
|
|
在粗糙地形上跟踪 Unitree Go1 机器人的速度命令 |
|
|
跟踪 Unitree Go2 机器人在平坦地形上的速度指令 |
|
|
在崎岖地形上追踪Unitree Go2机器人的速度指令 |
|
|
在平坦地形上使用波士顿动力的Spot机器人跟踪速度指令 |
|
|
在平坦地形上使用Unitree H1机器人跟踪速度命令 |
|
|
在崎岖地形上追踪Unitree H1机器人的速度指令 |
|
|
在平坦地形上跟踪 Unitree G1 机器人上的速度命令 |
|
|
在崎岖地形上追踪Unitree G1机器人的速度命令 |
|
|
在平坦地形上使用 Agility Digit 机器人跟踪速度命令 |
|
|
在粗糙地形上使用 Agility Digit 机器人跟踪速度命令 |
|
|
使用 Agility Digit 机器人跟踪机身速度和手部姿态命令 |



导航#
世界 |
环境 ID |
描述 |
|---|---|---|
|
anymal_c_nav-link |
朝着目标 x-y 位置和方向导航,使用 ANYmal C 机器人。 |
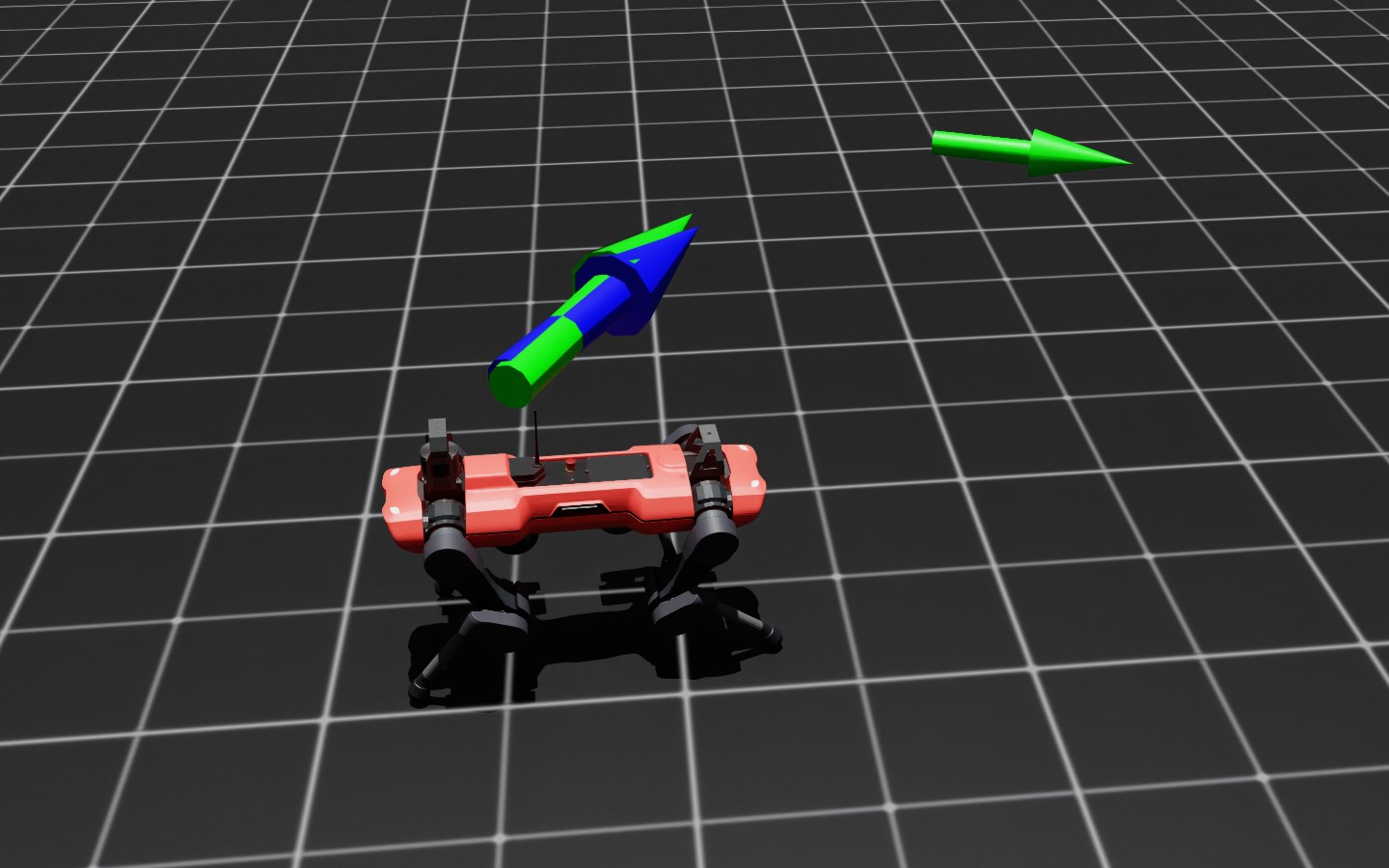
多旋翼#
备注
多旋翼条目提供了用于飞行 ARL 机器人的环境配置。有关详细信息,请参阅代码库中的 drone_arl 文件夹和 ARL 机器人配置 (ARL_ROBOT_1_CFG)。
世界 |
环境 ID |
描述 |
|---|---|---|
|
使用 track_position_state_based 任务对 ARL 机器人进行设定点位置控制。 |
Others#
备注
对抗运动先验 (AMP) 训练仅在 skrl 库中可用,因为它是当前集成的库中唯一一个开箱即用支持该功能的库(对于其他库,需要实现该算法和架构)。有关更多信息,请参见 skrl's AMP Documentation 。可以通过向训练/播放脚本添加命令行输入 --algorithm AMP 来激活 AMP 算法。
为了评估,脚本的命令行输入 --real-time 允许环境和智能体之间的交互循环在可能的情况下实时运行。
世界 |
环境 ID |
描述 |
|---|---|---|
|
使用推力在目标点飞行和悬停Crazyflie无人机。 |
|
|
Isaac-Humanoid-AMP-Dance-Direct-v0 |
通过模仿不同的预先录制的人类动画(对抗性运动先验),移动一个类人机器人。 |
空间展示#
cartpole_showcase 文件夹包含示例任务(基于 Cartpole 和 Cartpole-Camera Direct 任务),用于定义/使用 Isaac Lab 支持的各种 Gymnasium 观测空间和动作空间。
备注
目前,仅 Isaac Lab 的 Direct 工作流支持定义除 Box 之外的观测空间和动作空间。请参阅 Direct 工作流的 observation_space / action_space 文档以获取更多详细信息。
下表总结了 Cartpole 和 Cartpole-Camera 任务中展示的不同观测空间与动作空间的组合。在训练和评估的任务名称中,用 <OBSERVATION> 和 <ACTION> 替换相应的观测空间和动作空间。
| action space | ||||||
| Box | Discrete | MultiDiscrete | ||||
observation space |
Box | x | x | x | ||
| Discrete | x | x | x | |||
| MultiDiscrete | x | x | x | |||
| Dict | x | x | x | |||
| Tuple | x | x | x | |||
| action space | ||||||
| Box | Discrete | MultiDiscrete | ||||
observation space |
Box | x | x | x | ||
| Discrete | - | - | - | |||
| MultiDiscrete | - | - | - | |||
| Dict | x | x | x | |||
| Tuple | x | x | x | |||
多智能体#
备注
真正的多智能体训练仅在 skrl 库中可用,更多信息请参见 多智能体文档 。它支持 IPPO 和 MAPPO 算法,可以通过在训练/回放脚本中添加命令行输入 --algorithm IPPO 或 --algorithm MAPPO 来激活。如果这些环境与其他库一起运行或没有 IPPO 或 MAPPO 标志,它们将在后台转换为单智能体环境。
经典#
世界 |
环境 ID |
描述 |
|---|---|---|
|
移动小车和摆锤以保持最后一个向上,在经典的倒立双摆控制小车上。 |
操作臂#
基于固定机械臂操作任务的环境。
世界 |
环境 ID |
描述 |
|---|---|---|
|
将一个物体从一只手传递到另一只手 |
综合环境列表#
对于在 推理任务名称 下列出不同任务名称的环境,请在运行 play.py 或任何推理工作流时使用提供的推理任务名称。这些任务提供了更适合推理的配置,包括从已训练好的检查点读取数据,并禁用训练时使用的运行时扰动。
任务名称 |
推理任务名称 |
工作流程 |
RL 库 |
Isaac-Ant-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Ant-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Cart-Double-Pendulum-Direct-v0 |
直接 |
rl_games (PPO), skrl (IPPO, PPO, MAPPO) |
|
Isaac-Cartpole-Camera-Showcase-Box-Box-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Box-Discrete-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Box-MultiDiscrete-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Dict-Box-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Dict-Discrete-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Dict-MultiDiscrete-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Tuple-Box-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Tuple-Discrete-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Camera-Showcase-Tuple-MultiDiscrete-Direct-v0(需要使用 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Depth-Camera-Direct-v0(需要使用 |
直接 |
rl_games (PPO), skrl (PPO) |
|
Isaac-Cartpole-Depth-v0(需要使用 |
基于管理器的 |
rl_games (PPO) |
|
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
||
Isaac-Cartpole-RGB-Camera-Direct-v0(需要使用 |
直接 |
rl_games (PPO), skrl (PPO) |
|
Isaac-Cartpole-RGB-ResNet18-v0(需要使用 |
基于管理器的 |
rl_games (PPO) |
|
Isaac-Cartpole-RGB-TheiaTiny-v0(需要使用 |
基于管理器的 |
rl_games (PPO) |
|
Isaac-Cartpole-RGB-v0(需要使用 |
基于管理器的 |
rl_games (PPO) |
|
Isaac-Cartpole-Showcase-Box-Box-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Box-Discrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Box-MultiDiscrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Dict-Box-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Dict-Discrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Dict-MultiDiscrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Discrete-Box-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Discrete-Discrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Discrete-MultiDiscrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-MultiDiscrete-Box-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-MultiDiscrete-Discrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-MultiDiscrete-MultiDiscrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Tuple-Box-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Tuple-Discrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-Showcase-Tuple-MultiDiscrete-Direct-v0 |
直接 |
skrl (PPO) |
|
Isaac-Cartpole-v0 |
基于管理器的 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Factory-GearMesh-Direct-v0 |
直接 |
rl_games (PPO) |
|
Isaac-Factory-NutThread-Direct-v0 |
直接 |
rl_games (PPO) |
|
Isaac-Factory-PegInsert-Direct-v0 |
直接 |
rl_games (PPO) |
|
Isaac-AutoMate-Assembly-Direct-v0 |
直接 |
rl_games (PPO) |
|
Isaac-AutoMate-Disassembly-Direct-v0 |
直接 |
||
Isaac-Forge-GearMesh-Direct-v0 |
直接 |
rl_games (PPO) |
|
Isaac-Forge-NutThread-Direct-v0 |
直接 |
rl_games (PPO) |
|
Isaac-Forge-PegInsert-Direct-v0 |
直接 |
rl_games (PPO) |
|
Isaac-Franka-Cabinet-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Humanoid-AMP-Dance-Direct-v0 |
直接 |
skrl (AMP) |
|
Isaac-Humanoid-AMP-Run-Direct-v0 |
直接 |
skrl (AMP) |
|
Isaac-Humanoid-AMP-Walk-Direct-v0 |
直接 |
skrl (AMP) |
|
Isaac-Humanoid-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Humanoid-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO), skrl (PPO), sb3 (PPO) |
|
Isaac-Lift-Cube-Franka-IK-Abs-v0 |
基于管理器的 |
||
Isaac-Lift-Cube-Franka-IK-Rel-v0 |
基于管理器的 |
||
Isaac-Lift-Cube-Franka-v0 |
Isaac-Lift-Cube-Franka-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO), rl_games (PPO), sb3 (PPO) |
Isaac-Lift-Teddy-Bear-Franka-IK-Abs-v0 |
基于管理器的 |
||
Isaac-Tracking-LocoManip-Digit-v0 |
Isaac-Tracking-LocoManip-Digit-Play-v0 |
基于管理器的 |
rsl_rl (PPO) |
Isaac-Navigation-Flat-Anymal-C-v0 |
Isaac-Navigation-Flat-Anymal-C-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Open-Drawer-Franka-IK-Abs-v0 |
基于管理器的 |
||
Isaac-Open-Drawer-Franka-IK-Rel-v0 |
基于管理器的 |
||
Isaac-Open-Drawer-Franka-v0 |
Isaac-Open-Drawer-Franka-Play-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Quadcopter-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Reach-Franka-IK-Abs-v0 |
基于管理器的 |
||
Isaac-Reach-Franka-IK-Rel-v0 |
基于管理器的 |
||
Isaac-Reach-Franka-OSC-v0 |
Isaac-Reach-Franka-OSC-Play-v0 |
基于管理器的 |
rsl_rl (PPO) |
Isaac-Reach-Franka-v0 |
Isaac-Reach-Franka-Play-v0 |
基于管理器的 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Reach-UR10-v0 |
Isaac-Reach-UR10-Play-v0 |
基于管理器的 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Deploy-Reach-UR10e-v0 |
Isaac-Deploy-Reach-UR10e-Play-v0 |
基于管理器的 |
rsl_rl (PPO) |
Isaac-Repose-Cube-Allegro-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Allegro-NoVelObs-v0 |
Isaac-Repose-Cube-Allegro-NoVelObs-Play-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Repose-Cube-Allegro-v0 |
Isaac-Repose-Cube-Allegro-Play-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Repose-Cube-Shadow-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Shadow-OpenAI-FF-Direct-v0 |
直接 |
rl_games (FF), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Repose-Cube-Shadow-OpenAI-LSTM-Direct-v0 |
直接 |
rl_games (LSTM) |
|
手中立方体的重新定向,使用 Shadow hand 和感知输入。(需要使用 |
Isaac-Repose-Cube-Shadow-Vision-Direct-Play-v0 (需要使用 |
直接 |
rsl_rl (PPO), rl_games (VISION) |
Isaac-Shadow-Hand-Over-Direct-v0 |
直接 |
rl_games (PPO), skrl (IPPO, PPO, MAPPO) |
|
Isaac-Stack-Cube-Franka-IK-Rel-v0 |
基于管理器的 |
||
Isaac-Dexsuite-Kuka-Allegro-Lift-v0 |
Isaac-Dexsuite-Kuka-Allegro-Lift-Play-v0 |
基于管理器的 |
rl_games (PPO), rsl_rl (PPO) |
Isaac-Dexsuite-Kuka-Allegro-Reorient-v0 |
Isaac-Dexsuite-Kuka-Allegro-Reorient-Play-v0 |
基于管理器的 |
rl_games (PPO), rsl_rl (PPO) |
Isaac-Stack-Cube-Franka-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Instance-Randomize-Franka-IK-Rel-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Instance-Randomize-Franka-v0 |
基于管理器的 |
||
Isaac-PickPlace-G1-InspireFTP-Abs-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-UR10-Long-Suction-IK-Rel-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-UR10-Short-Suction-IK-Rel-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Galbot-Right-Arm-Suction-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-v0 |
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-Play-v0 |
基于管理器的 |
|
Isaac-Place-Mug-Agibot-Left-Arm-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Place-Toy2Box-Agibot-Right-Arm-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Galbot-Right-Arm-Suction-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-v0 |
Isaac-Stack-Cube-Galbot-Left-Arm-Gripper-Visuomotor-Play-v0 |
基于管理器的 |
|
Isaac-Place-Mug-Agibot-Left-Arm-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Place-Toy2Box-Agibot-Right-Arm-RmpFlow-v0 |
基于管理器的 |
||
Isaac-Velocity-Flat-Anymal-B-v0 |
Isaac-Velocity-Flat-Anymal-B-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Anymal-C-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Velocity-Flat-Anymal-C-v0 |
Isaac-Velocity-Flat-Anymal-C-Play-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Anymal-D-v0 |
Isaac-Velocity-Flat-Anymal-D-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Cassie-v0 |
Isaac-Velocity-Flat-Cassie-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Digit-v0 |
Isaac-Velocity-Flat-Digit-Play-v0 |
基于管理器的 |
rsl_rl (PPO) |
Isaac-Velocity-Flat-G1-v0 |
Isaac-Velocity-Flat-G1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-H1-v0 |
Isaac-Velocity-Flat-H1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Spot-v0 |
Isaac-Velocity-Flat-Spot-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Unitree-A1-v0 |
Isaac-Velocity-Flat-Unitree-A1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
Isaac-Velocity-Flat-Unitree-Go1-v0 |
Isaac-Velocity-Flat-Unitree-Go1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Flat-Unitree-Go2-v0 |
Isaac-Velocity-Flat-Unitree-Go2-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-B-v0 |
Isaac-Velocity-Rough-Anymal-B-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-C-Direct-v0 |
直接 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
|
Isaac-Velocity-Rough-Anymal-C-v0 |
Isaac-Velocity-Rough-Anymal-C-Play-v0 |
基于管理器的 |
rl_games (PPO), rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Anymal-D-v0 |
Isaac-Velocity-Rough-Anymal-D-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Cassie-v0 |
Isaac-Velocity-Rough-Cassie-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Digit-v0 |
Isaac-Velocity-Rough-Digit-Play-v0 |
基于管理器的 |
rsl_rl (PPO) |
Isaac-Velocity-Rough-G1-v0 |
Isaac-Velocity-Rough-G1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-H1-v0 |
Isaac-Velocity-Rough-H1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Unitree-A1-v0 |
Isaac-Velocity-Rough-Unitree-A1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO), sb3 (PPO) |
Isaac-Velocity-Rough-Unitree-Go1-v0 |
Isaac-Velocity-Rough-Unitree-Go1-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Velocity-Rough-Unitree-Go2-v0 |
Isaac-Velocity-Rough-Unitree-Go2-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO) |
Isaac-Reach-OpenArm-Bi-v0 |
Isaac-Reach-OpenArm-Bi-Play-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO) |
Isaac-Reach-OpenArm-v0 |
Isaac-Reach-OpenArm-Play-v0 |
基于管理器的 |
rsl_rl (PPO), skrl (PPO), rl_games (PPO) |
Isaac-Lift-Cube-OpenArm-v0 |
Isaac-Lift-Cube-OpenArm-Play-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO) |
Isaac-Open-Drawer-OpenArm-v0 |
Isaac-Open-Drawer-OpenArm-Play-v0 |
基于管理器的 |
rsl_rl (PPO), rl_games (PPO) |