生成基本物体到场景中#
本教程探讨了如何从Python在Isaac Lab中将各种对象(或基本物体)生成到场景中。它基于先前的教程,演示了如何从独立脚本运行仿真器,并演示了如何生成地面平面、灯光、基本形状和来自USD文件的网格。
代码#
该教程对应于 scripts/tutorials/00_sim 目录中的 spawn_prims.py 脚本。让我们看一下Python脚本:
spawn_prims.py的代码
1# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
2# All rights reserved.
3#
4# SPDX-License-Identifier: BSD-3-Clause
5
6"""This script demonstrates how to spawn prims into the scene.
7
8.. code-block:: bash
9
10 # Usage
11 ./isaaclab.sh -p scripts/tutorials/00_sim/spawn_prims.py
12
13"""
14
15"""Launch Isaac Sim Simulator first."""
16
17
18import argparse
19
20from isaaclab.app import AppLauncher
21
22# create argparser
23parser = argparse.ArgumentParser(description="Tutorial on spawning prims into the scene.")
24# append AppLauncher cli args
25AppLauncher.add_app_launcher_args(parser)
26# parse the arguments
27args_cli = parser.parse_args()
28# launch omniverse app
29app_launcher = AppLauncher(args_cli)
30simulation_app = app_launcher.app
31
32"""Rest everything follows."""
33
34import isaaclab.sim as sim_utils
35from isaaclab.utils.assets import ISAAC_NUCLEUS_DIR
36
37
38def design_scene():
39 """Designs the scene by spawning ground plane, light, objects and meshes from usd files."""
40 # Ground-plane
41 cfg_ground = sim_utils.GroundPlaneCfg()
42 cfg_ground.func("/World/defaultGroundPlane", cfg_ground)
43
44 # spawn distant light
45 cfg_light_distant = sim_utils.DistantLightCfg(
46 intensity=3000.0,
47 color=(0.75, 0.75, 0.75),
48 )
49 cfg_light_distant.func("/World/lightDistant", cfg_light_distant, translation=(1, 0, 10))
50
51 # create a new xform prim for all objects to be spawned under
52 sim_utils.create_prim("/World/Objects", "Xform")
53 # spawn a red cone
54 cfg_cone = sim_utils.ConeCfg(
55 radius=0.15,
56 height=0.5,
57 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),
58 )
59 cfg_cone.func("/World/Objects/Cone1", cfg_cone, translation=(-1.0, 1.0, 1.0))
60 cfg_cone.func("/World/Objects/Cone2", cfg_cone, translation=(-1.0, -1.0, 1.0))
61
62 # spawn a green cone with colliders and rigid body
63 cfg_cone_rigid = sim_utils.ConeCfg(
64 radius=0.15,
65 height=0.5,
66 rigid_props=sim_utils.RigidBodyPropertiesCfg(),
67 mass_props=sim_utils.MassPropertiesCfg(mass=1.0),
68 collision_props=sim_utils.CollisionPropertiesCfg(),
69 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0)),
70 )
71 cfg_cone_rigid.func(
72 "/World/Objects/ConeRigid", cfg_cone_rigid, translation=(-0.2, 0.0, 2.0), orientation=(0.5, 0.0, 0.5, 0.0)
73 )
74
75 # spawn a blue cuboid with deformable body
76 cfg_cuboid_deformable = sim_utils.MeshCuboidCfg(
77 size=(0.2, 0.5, 0.2),
78 deformable_props=sim_utils.DeformableBodyPropertiesCfg(),
79 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 0.0, 1.0)),
80 physics_material=sim_utils.DeformableBodyMaterialCfg(),
81 )
82 cfg_cuboid_deformable.func("/World/Objects/CuboidDeformable", cfg_cuboid_deformable, translation=(0.15, 0.0, 2.0))
83
84 # spawn a usd file of a table into the scene
85 cfg = sim_utils.UsdFileCfg(usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Mounts/SeattleLabTable/table_instanceable.usd")
86 cfg.func("/World/Objects/Table", cfg, translation=(0.0, 0.0, 1.05))
87
88
89def main():
90 """Main function."""
91
92 # Initialize the simulation context
93 sim_cfg = sim_utils.SimulationCfg(dt=0.01, device=args_cli.device)
94 sim = sim_utils.SimulationContext(sim_cfg)
95 # Set main camera
96 sim.set_camera_view([2.0, 0.0, 2.5], [-0.5, 0.0, 0.5])
97 # Design scene
98 design_scene()
99 # Play the simulator
100 sim.reset()
101 # Now we are ready!
102 print("[INFO]: Setup complete...")
103
104 # Simulate physics
105 while simulation_app.is_running():
106 # perform step
107 sim.step()
108
109
110if __name__ == "__main__":
111 # run the main function
112 main()
113 # close sim app
114 simulation_app.close()
代码解释#
Omniverse中的场景设计是建立在名为USD(Universal Scene Description)的软件系统和文件格式周围的。它允许以层次结构方式描述3D场景,类似于文件系统。由于USD是一个全面的框架,我们建议阅读 USD文档 以了解更多信息。
为了完整起见,在本教程中我们介绍USD的必要概念。
基本形状(Prims): 这些是USD场景的基本构建块。它们可以被视为场景图中的节点。每个节点可以是网格、光源、相机或变换。它也可以是其下其他基本物体的组。
属性: 这些是基本物体的属性。可以将它们看作是键-值对。例如,一个基本物体可以有一个名为
color的属性,其值为red。关系: 这些是基本物体之间的连接。可以将它们视为指向其他基体的指针。例如,一个网格基本体可以与一个用于着色的材质基本体建立关系。
这些基本物体、其属性和关系的集合被称为一个 USD场景 。可以将其看作是场景中所有基本物体的容器。当我们说我们正在设计一个场景时,我们实际上正在设计一个USD场景。
使用直接的USD API提供了很大的灵活性,但学习和使用起来可能很麻烦。为了更轻松地设计场景,Isaac Lab建立在USD API之上,提供了一个基于配置的接口来将基本物体生成到场景中。这些包含在 sim.spawners 模块中。
当将基本物体生成到场景中时,每个基本物体都需要一个定义其属性和关系(通过材质和着色信息)的配置类实例。然后将配置类传递给其相应的函数,其中指定了基本物体名称和变换。该函数然后将基本物体生成到场景中。
在高层次上,它是如何工作的:
# Create a configuration class instance
cfg = MyPrimCfg()
prim_path = "/path/to/prim"
# Spawn the prim into the scene using the corresponding spawner function
spawn_my_prim(prim_path, cfg, translation=[0, 0, 0], orientation=[1, 0, 0, 0], scale=[1, 1, 1])
# OR
# Use the spawner function directly from the configuration class
cfg.func(prim_path, cfg, translation=[0, 0, 0], orientation=[1, 0, 0, 0], scale=[1, 1, 1])
在本教程中,我们演示将各种不同的基本物体生成到场景中。有关可用的生成器的更多信息,请参考Isaac Lab中的 sim.spawners 模块 .
注意
所有的场景设计必须在仿真开始之前进行。一旦仿真开始,我们建议保持场景冻结,并仅更改基本物体的属性。这对于GPU仿真特别重要,因为在仿真过程中添加新的基本物体可能会改变GPU上的物理仿真缓冲区,并导致意外行为。
生成地面平面#
GroundPlaneCfg 配置了一个类似网格的地面平面,其外观和大小等属性可修改。
# Ground-plane
cfg_ground = sim_utils.GroundPlaneCfg()
cfg_ground.func("/World/defaultGroundPlane", cfg_ground)
生成灯光#
可以将 不同类型的灯光基本体 生成到场景中。这些包括远光灯、球形灯、圆盘灯和圆柱灯。在本教程中,我们生成一个远光灯,这是一种远离场景无限远的灯,只朝一个方向发光。
# spawn distant light
cfg_light_distant = sim_utils.DistantLightCfg(
intensity=3000.0,
color=(0.75, 0.75, 0.75),
)
cfg_light_distant.func("/World/lightDistant", cfg_light_distant, translation=(1, 0, 10))
生成基本形状#
在生成基本形状之前,我们介绍了一个变换基本体或Xform的概念。变换基本体是一个仅包含变换属性的基本体。它用于将其他基本体分组,并作为一个组对其进行变换。在这里,我们创建一个Xform基本体,将所有的基本形状分组在其中。
# create a new xform prim for all objects to be spawned under
sim_utils.create_prim("/World/Objects", "Xform")
接下来,我们使用 ConeCfg 类生成一个圆锥体。可以指定圆锥体的半径、高度、物理属性和材质属性。默认情况下,物理和材质属性是禁用的。
我们生成的前两个圆锥 Cone1 和 Cone2 是视觉元素,不启用物理属性。
# spawn a red cone
cfg_cone = sim_utils.ConeCfg(
radius=0.15,
height=0.5,
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(1.0, 0.0, 0.0)),
)
cfg_cone.func("/World/Objects/Cone1", cfg_cone, translation=(-1.0, 1.0, 1.0))
cfg_cone.func("/World/Objects/Cone2", cfg_cone, translation=(-1.0, -1.0, 1.0))
对于第三个圆锥 ConeRigid ,我们在配置类中设置刚体物理属性。通过这些属性,我们可以指定圆锥体的质量、摩擦力和弹性。如果未指定,它们将默认为USD Physics设置的默认值。
# spawn a green cone with colliders and rigid body
cfg_cone_rigid = sim_utils.ConeCfg(
radius=0.15,
height=0.5,
rigid_props=sim_utils.RigidBodyPropertiesCfg(),
mass_props=sim_utils.MassPropertiesCfg(mass=1.0),
collision_props=sim_utils.CollisionPropertiesCfg(),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0)),
)
cfg_cone_rigid.func(
"/World/Objects/ConeRigid", cfg_cone_rigid, translation=(-0.2, 0.0, 2.0), orientation=(0.5, 0.0, 0.5, 0.0)
)
最后,我们生成一个长方体 CuboidDeformable ,其中包含可变形体物理属性。与刚体仿真不同,可变形体可以在其顶点之间具有相对运动。这对于仿真软体如布料、橡胶或果冻非常有用。需要注意的是,可变形体仅在GPU仿真中受支持,并且需要生成一个带有可变形体物理属性的网格对象。
# spawn a blue cuboid with deformable body
cfg_cuboid_deformable = sim_utils.MeshCuboidCfg(
size=(0.2, 0.5, 0.2),
deformable_props=sim_utils.DeformableBodyPropertiesCfg(),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 0.0, 1.0)),
physics_material=sim_utils.DeformableBodyMaterialCfg(),
)
cfg_cuboid_deformable.func("/World/Objects/CuboidDeformable", cfg_cuboid_deformable, translation=(0.15, 0.0, 2.0))
从另一个文件生成#
最后,可以从其他文件格式生成基本体,例如其他USD、URDF或OBJ文件。在本教程中,我们将一个表的USD文件生成到场景中。这个表是一个网格基本体,并且有一个与之关联的材质基本体。所有这些信息都存储在其USD文件中。
# spawn a usd file of a table into the scene
cfg = sim_utils.UsdFileCfg(usd_path=f"{ISAAC_NUCLEUS_DIR}/Props/Mounts/SeattleLabTable/table_instanceable.usd")
cfg.func("/World/Objects/Table", cfg, translation=(0.0, 0.0, 1.05))
上面的表被添加为场景的一个引用。简单来说,这意味着表实际上并没有添加到场景中,而是添加了一个指向表资产的 指针 。这允许我们修改表资产,并使更改以非破坏性的方式反映在场景中。例如,我们可以更改表的材质,而不实际修改表资产的底层文件。只有更改存储在USD场景中。
执行脚本#
与之前的教程类似,要运行脚本,请执行以下命令:
./isaaclab.sh -p scripts/tutorials/00_sim/spawn_prims.py
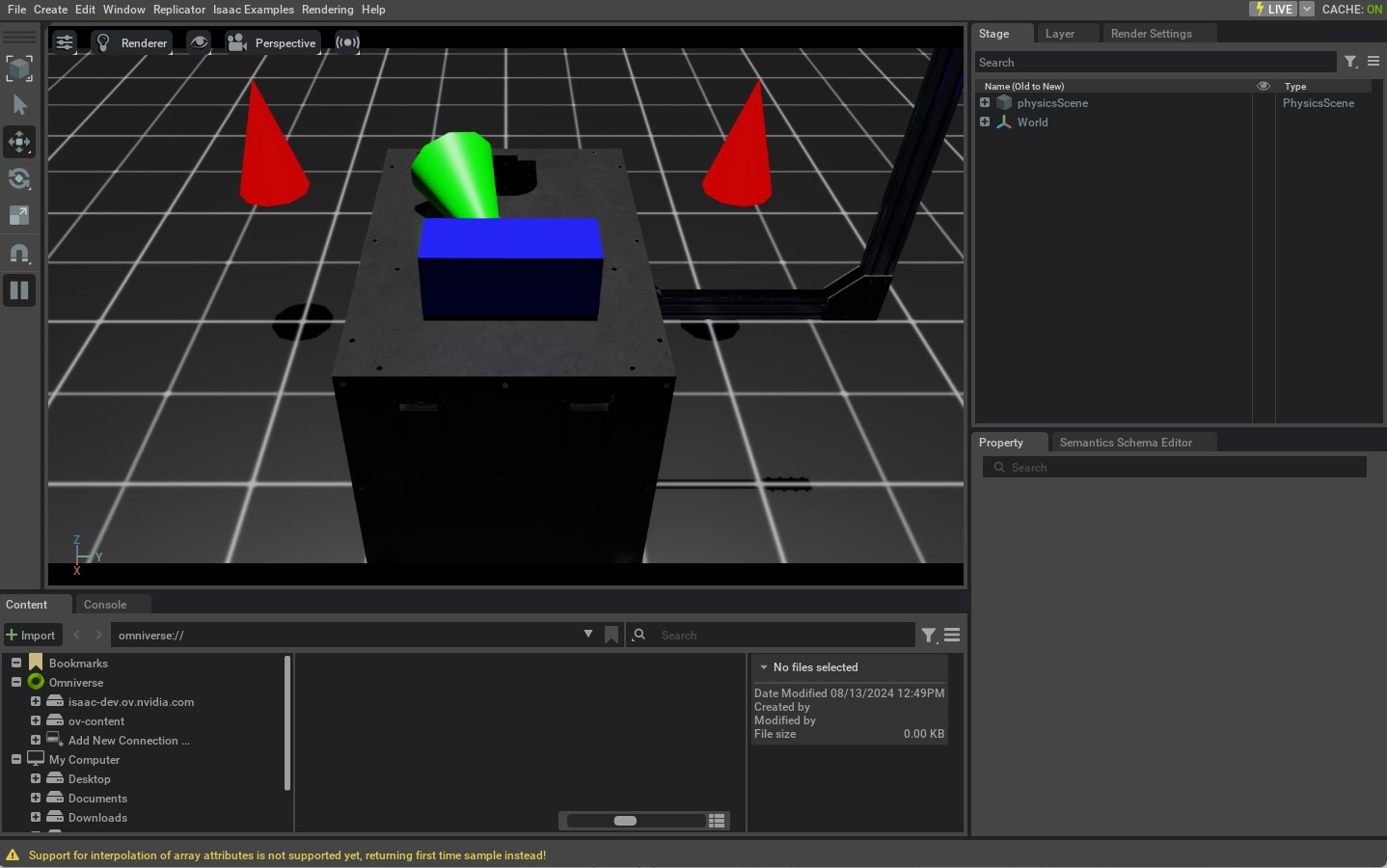
一旦仿真开始,您应该看到一个具有地面平面、灯光、一些圆锥体和一个表的窗口。启用刚体物理属性的绿色圆锥体应该会掉落并与表和地面平面碰撞。其他圆锥体是视觉元素,不应该移动。要停止仿真,您可以关闭窗口,或在终端中按 Ctrl+C 。
本教程为在Isaac Lab中生成各种基本体提供了一个基础。虽然简单,但它展示了在Isaac Lab中设计场景的基本概念以及如何使用生成器。在接下来的教程中,我们将看看如何与场景和仿真进行交互。