OpenUSD and Tuning Best Practices Tutorial Series#
This tutorial series gives you the intuition and science of physics tuning for robotic assets in NVIDIA Isaac Sim so that your simulated robots behave realistically. Rigging and tuning complex assets—such as a dexterous hand—is foundational to successful robot learning and simulation. If the asset is not properly configured (collision meshes, mass properties, joint parameters), the simulation will be unstable, inaccurate, and unusable for training and validation.
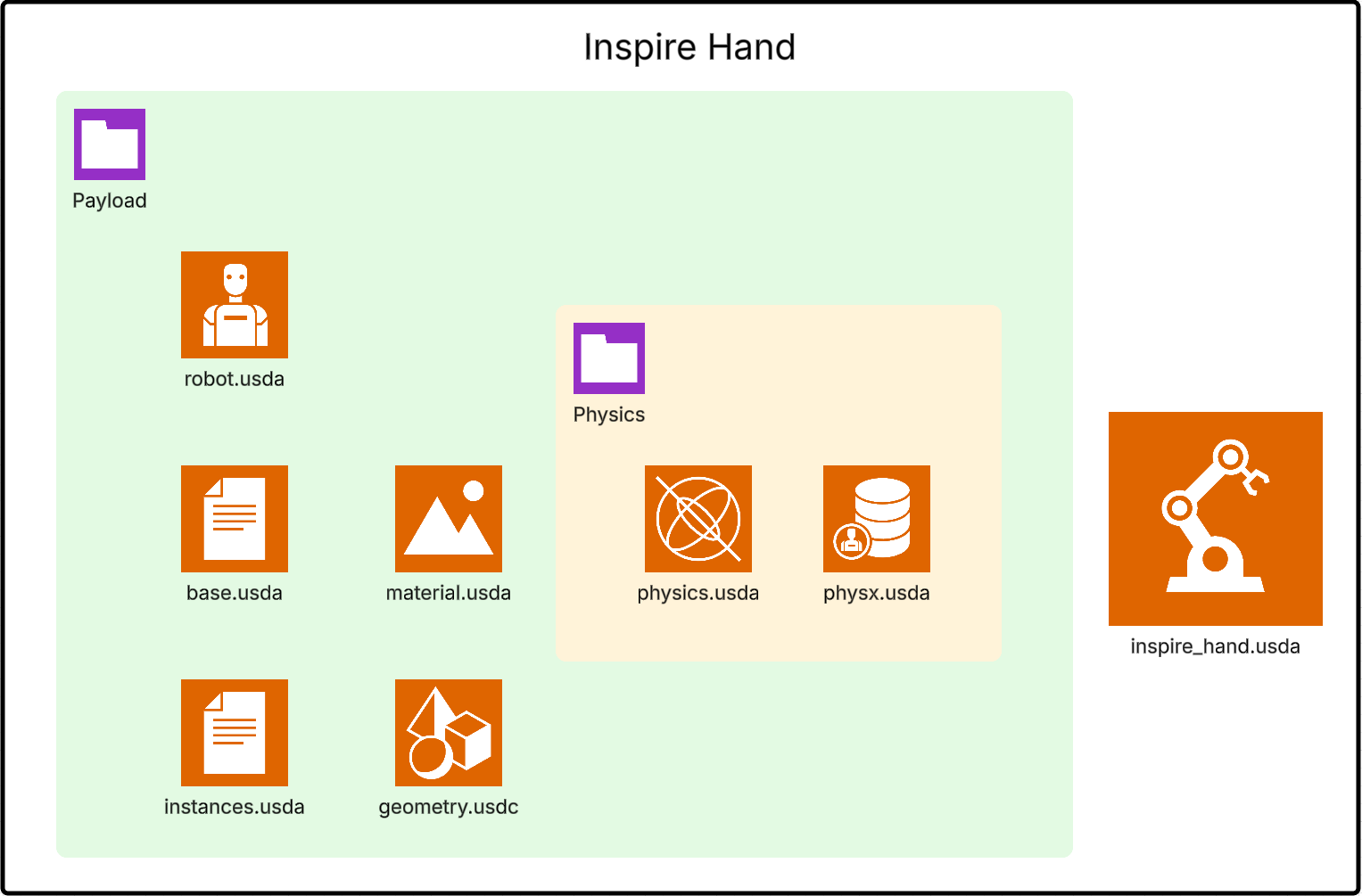
Over this series, you work hands-on with the Inspire Hand asset in Isaac Sim to inspect the robot USD and asset structure, apply OpenUSD best practices for performance and stability, and tune joint parameters and control gains for stable, critically damped motion.
This series takes approximately 60–90 minutes to complete as a hands-on lab.
Learning Objectives#
By the end of this series, you will be able to:
Explain the end-to-end process for inspecting and preparing robot USD assets for simulation.
Apply best practices to optimize the robot USD for performance and stability.
Tune joint parameters and control gains to achieve stable, critically damped, and realistic robot motion in simulation.
We start by inspecting the robot USD, then configuring collision filters to manage self-collision, and finally tuning joint parameters: drive limits (max force, max velocity) and stiffness and damping with the Gain Tuner. By the end, you will have a stable, functioning robotic hand ready to attach to an arm for a grasping controller.
Tutorials in This Series#
To get started, see Tutorial 1: Setup.