Randomization Dependency: Incremental Examples#
IRO aims to provide flexible while accurate description of randomization and relationship among randomized values using fundamental building blocks:
These elements can be wired up with macros to form a DAG-like dependency tree, such that a randomized element can depend on another randomization.
Note
The images in the following examples are generated using the embedded interface. In the viewport, you can focus on a selected prim by pressing “F”; and then you can press “Alt + Left Mouse Button” to rotate the active camera around the selected prim.
A Basic Example#
Let’s start with a basic example: “Randomly scatter ten randomly colored cubes on a plane”. The corresponding description file is:
isaacsim.replicator.object:
version: 0.x.y
num_frames: 3
seed: 0
output_path: PATH_TO_OUTPUT
simulation_time: 1
gravity: 981
dome_light:
intensity: 3000
subtype: dome
type: light
cube_size: 0.5
basic_shape:
count: 10
type: geometry
subtype: cube
tracked: true
physics: rigidbody
color:
distribution_type: range
start:
- 0.0
- 0.0
- 0.0
end:
- 1.0
- 1.0
- 1.0
transform_operators:
- translate:
distribution_type: range
start:
- -300
- $[/cube_size] / 2 * 100
- -300
end:
- 300
- $[/cube_size] / 2 * 100
- 300
- rotateY:
distribution_type: range
start: -180
end: 180
- scale:
- $[/cube_size]
- $[/cube_size]
- $[/cube_size]
plane:
type: geometry
subtype: plane
tracked: true
physics: collision
color:
- 0.5
- 0.7
- 0.7
transform_operators:
- scale:
- 10
- 10
- 10
screen_height: 2160
screen_width: 3840
focal_length: 14.228393962367306
horizontal_aperture: 20.955
camera_parameters:
screen_width: $[/screen_width]
screen_height: $[/screen_height]
focal_length: $[/focal_length]
horizontal_aperture: $[/horizontal_aperture]
near_clip: 0.001
far_clip: 100000
default_camera:
camera_parameters: $[/camera_parameters]
transform_operators:
- rotateY: 30
- rotateX: -30
- translate:
- 0
- 0
- 500
type: camera
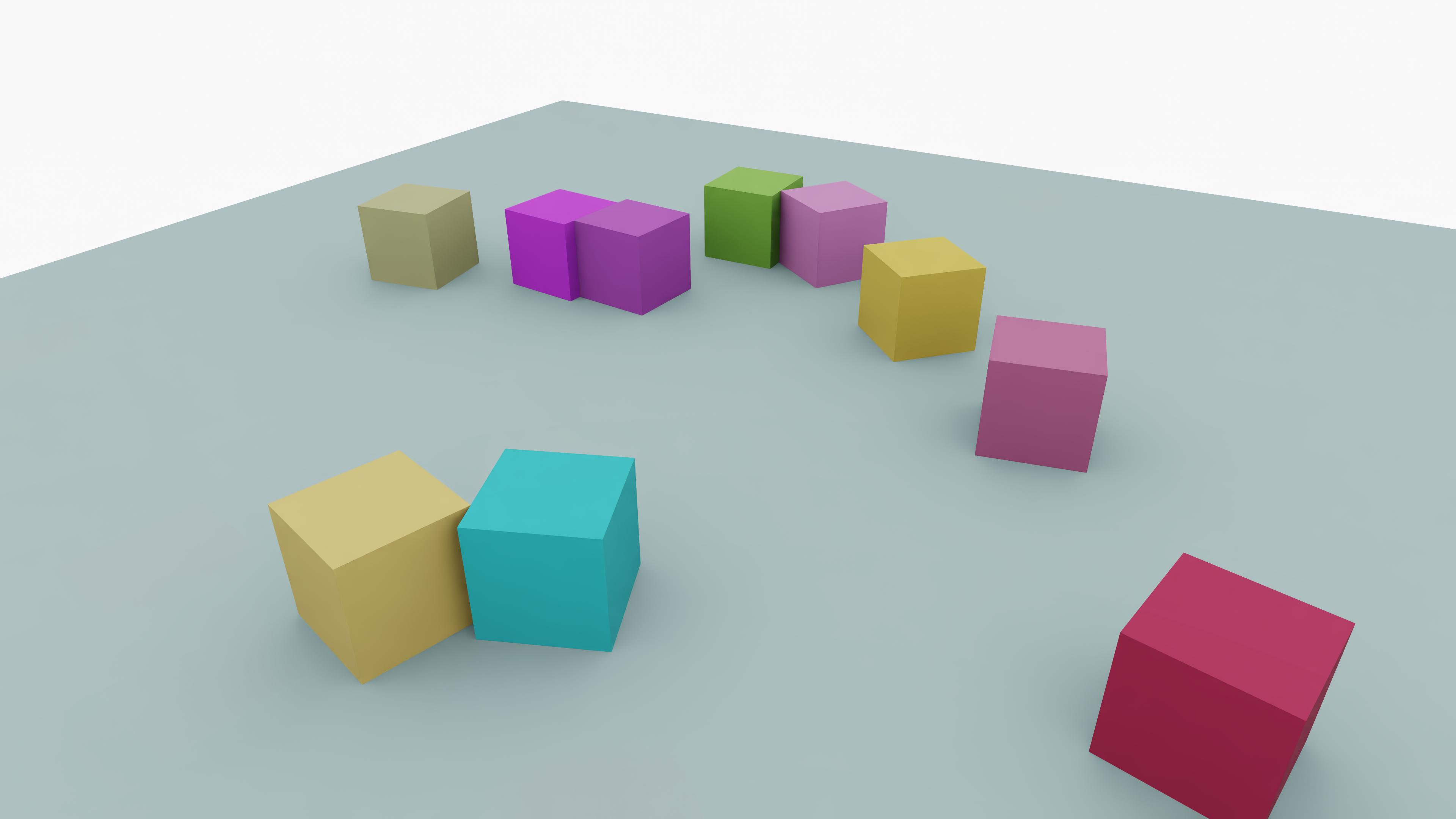
By using the embedded interface, you can create such a scene:
Randomization Dependency#
To take a step further, to “Randomly scatter 10 randomly colored cubes on a plane, with varying sizes from 0.5 to 1.5, and varying color from red to blue, the bigger the size, the redder it is while the smaller the size, the bluer it is”, you can do:
isaacsim.replicator.object:
version: 0.x.y
num_frames: 3
seed: 0
output_path: PATH_TO_OUTPUT
simulation_time: 1
gravity: 981
dome_light:
intensity: 3000
subtype: dome
type: light
size_coef:
count: 10
distribution_type: range
start: 0.0
end: 1.0
size_min: 0.5
size_max: 1.5
basic_shape:
count: 10
type: geometry
subtype: cube
tracked: true
physics: rigidbody
color:
- 0.0 + $[/size_coef_$[index]] * 1.0
- 0.0 + $[/size_coef_$[index]] * 0.0
- 1.0 + $[/size_coef_$[index]] * -1.0
size: $[/size_min] + $[/size_coef_$[index]] * ($[/size_max] - $[/size_min])
transform_operators:
- translate:
distribution_type: range
start:
- -300
- $[../size] / 2 * 100
- -300
end:
- 300
- $[../size] / 2 * 100
- 300
- rotateY:
distribution_type: range
start: -180
end: 180
- scale:
- $[../size]
- $[../size]
- $[../size]
plane:
type: geometry
subtype: plane
tracked: true
physics: collision
color:
- 0.5
- 0.7
- 0.7
transform_operators:
- scale:
- 10
- 10
- 10
screen_height: 2160
screen_width: 3840
focal_length: 14.228393962367306
horizontal_aperture: 20.955
camera_parameters:
screen_width: $[/screen_width]
screen_height: $[/screen_height]
focal_length: $[/focal_length]
horizontal_aperture: $[/horizontal_aperture]
near_clip: 0.001
far_clip: 100000
default_camera:
camera_parameters: $[/camera_parameters]
transform_operators:
- rotateY: 30
- rotateX: -30
- translate:
- 0
- 0
- 1000
type: camera
And we get:
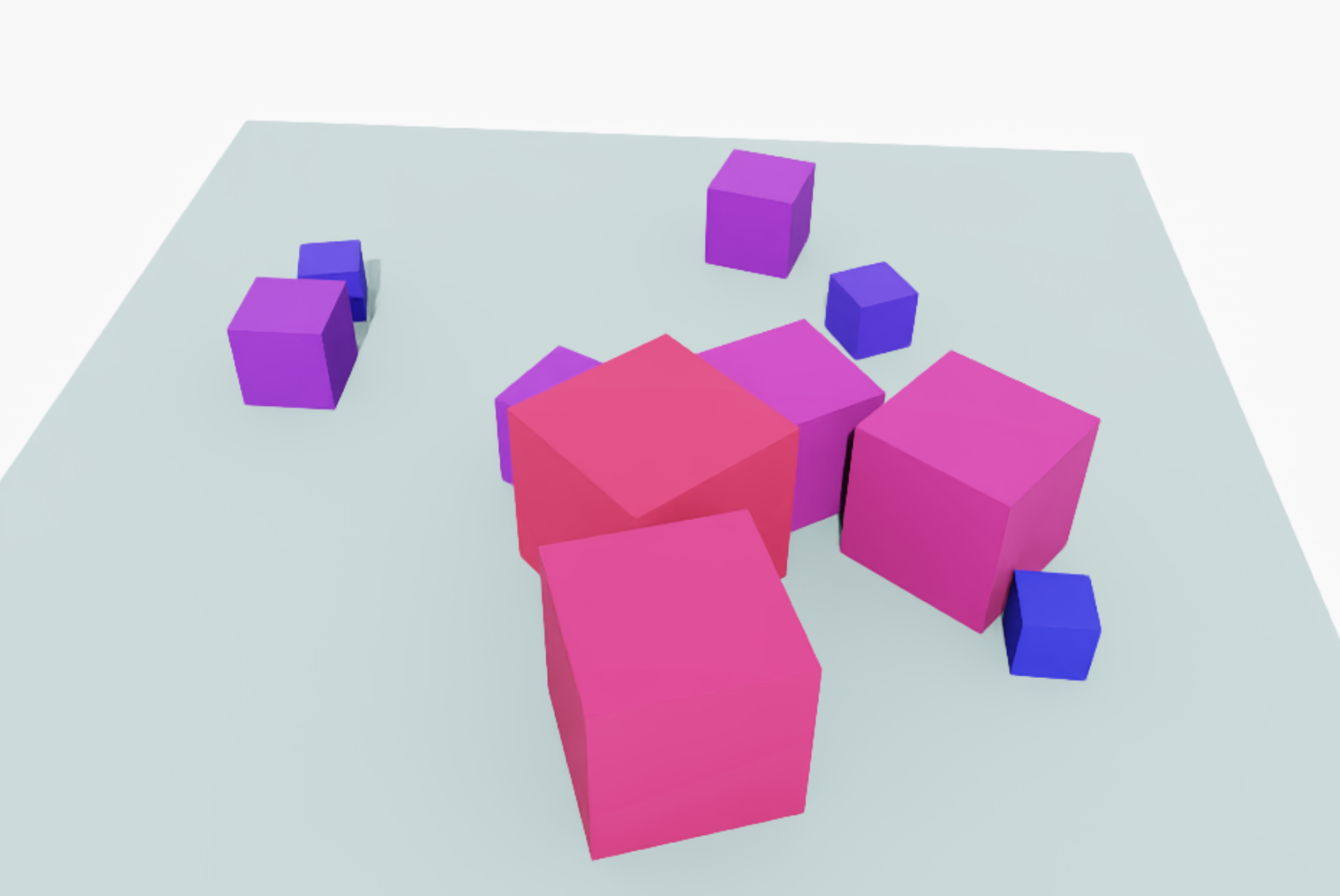
The bigger the redder, the smaller the bluer. This is achieved by dependent mutable attributes. The color is determined by linear interpolation between red and blue:
color:
- 0.0 + $[/size_coef_$[index]] * 1.0
- 0.0 + $[/size_coef_$[index]] * 0.0
- 1.0 + $[/size_coef_$[index]] * -1.0
Here:
basic_shape:
count: 10
Resolves to:
basic_shape_0:
index: 0
basic_shape_1:
index: 1
basic_shape_2:
index: 2
...
And that goes similarly for:
size_coef:
count: 10
distribution_type: range
start: 0.0
end: 1.0
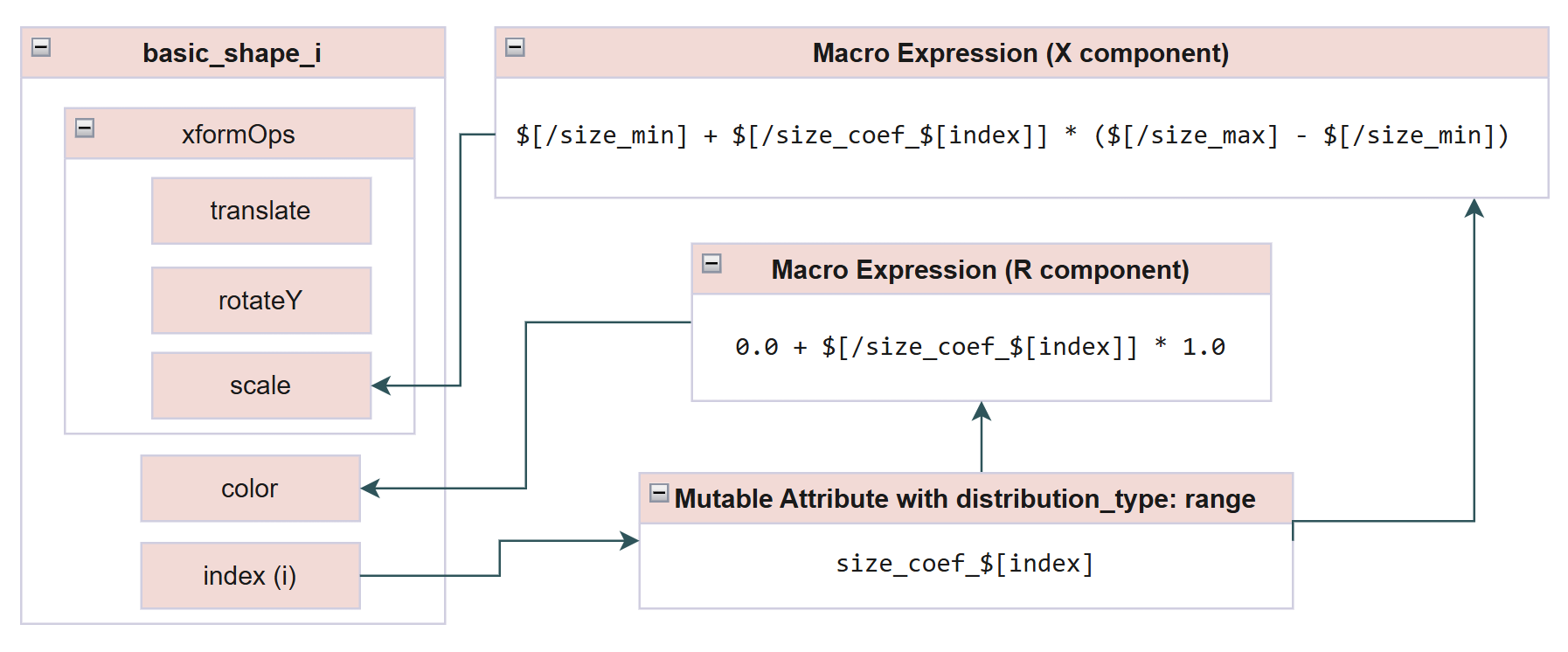
And then for basic_shape_0, for example, the R channel of color, 0.0 + $[/size_coef_$[index]] * 1.0, will resolve to 0.0 + $[/size_coef_0] * 1.0 and $/size_coef_0 will be replaced with a randomized value between 0 and 1. Here is a DAG chart that shows the symbol resolution process:
Harmonization#
Try to “pack the above cubes into a big box and randomly place and rotate this big box around the up axis”:
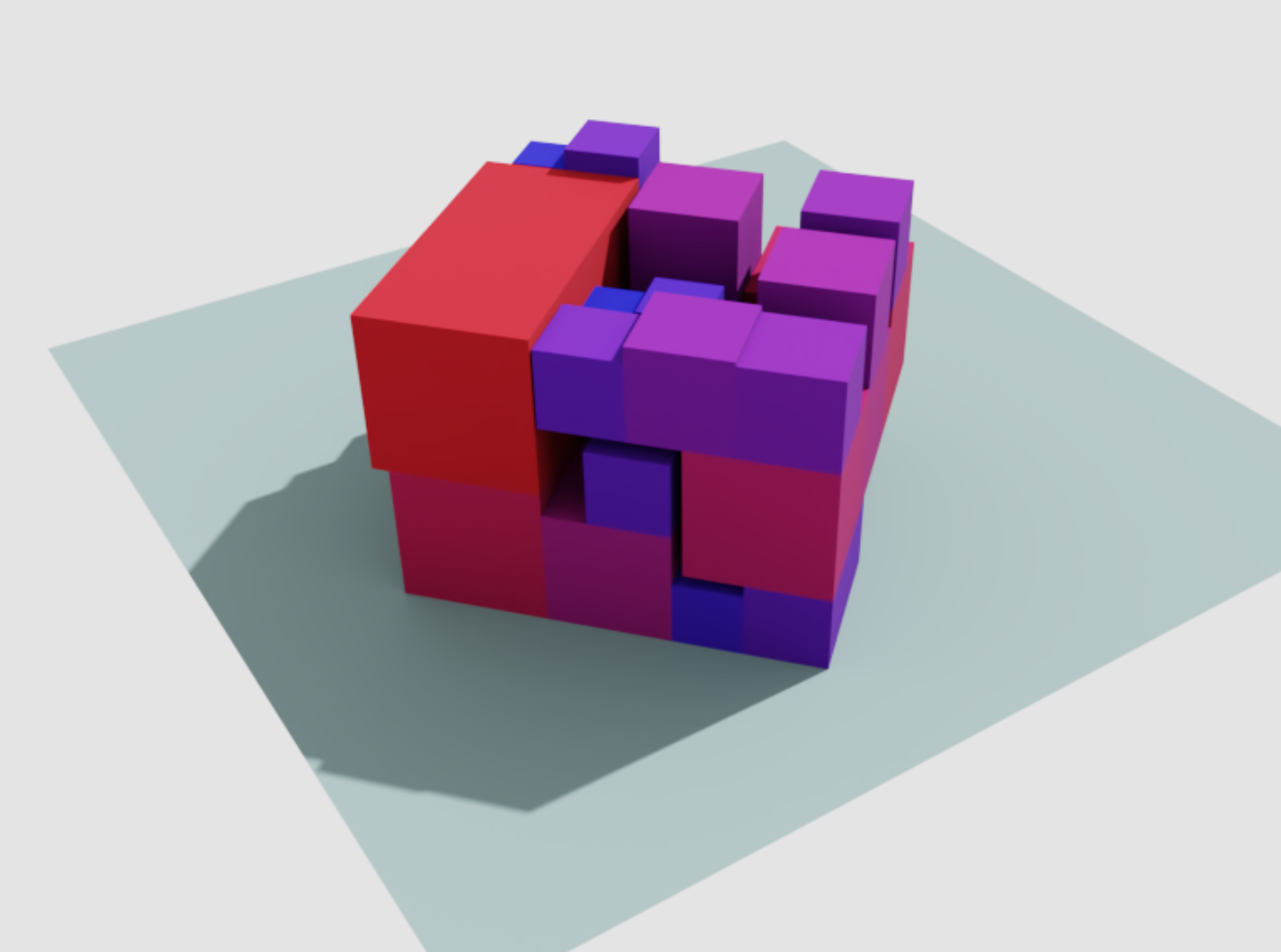
The corresponding description file:
isaacsim.replicator.object:
version: 0.x.y
num_frames: 3
seed: 0
output_path: PATH_TO_OUTPUT
simulation_time: 1
gravity: 981
dome_light:
intensity: 3000
subtype: dome
type: light
bin_pack_H:
harmonizer_type: bin_pack
bin_size:
- 400
- 300
- 400
size_coef:
count: 50
distribution_type: range
start: 0.0
end: 1.0
size_min: 0.5
size_max: 1.5
bin_translate:
distribution_type: range
start:
- -100
- 150
- -100
end:
- 100
- 150
- 100
bin_rotate_Y:
distribution_type: range
start: -180
end: 180
basic_shape:
count: 50
type: geometry
subtype: cube
tracked: true
physics: rigidbody
color:
- 0.0 + $[/size_coef_$[index]] * 1.0
- 0.0 + $[/size_coef_$[index]] * 0.0
- 1.0 + $[/size_coef_$[index]] * -1.0
size: $[/size_min] + $[/size_coef_$[index]] * ($[/size_max] - $[/size_min])
transform_operators:
- translate: $[/bin_translate]
- rotateY: $[/bin_rotate_Y]
- transform:
distribution_type: harmonized
harmonizer_name: bin_pack_H
pitch:
- - -$[../../size] / 2 * 100
- -$[../../size] / 2 * 100
- -$[../../size] / 2 * 100
- - $[../../size] / 2 * 100
- $[../../size] / 2 * 100
- $[../../size] / 2 * 100
- scale:
- $[../size]
- $[../size]
- $[../size]
plane:
type: geometry
subtype: plane
tracked: true
physics: collision
color:
- 0.5
- 0.7
- 0.7
transform_operators:
- scale:
- 10
- 10
- 10
screen_height: 2160
screen_width: 3840
focal_length: 14.228393962367306
horizontal_aperture: 20.955
camera_parameters:
screen_width: $[/screen_width]
screen_height: $[/screen_height]
focal_length: $[/focal_length]
horizontal_aperture: $[/horizontal_aperture]
near_clip: 0.001
far_clip: 100000
default_camera:
camera_parameters: $[/camera_parameters]
transform_operators:
- rotateY: 30
- rotateX: -30
- translate:
- 0
- 0
- 1500
type: camera
Here, translate and rotateY defines the global movement of the big box (the bin), and transform is a harmonized mutable attribute. The global translate and rotateY has the same value for all basic shapes, though randomized per frame. This is why the mutable attributes are defined outside of the basic shapes and then referenced through macros. Had it been defined inside the xformOps list, each basic shape would have a different randomized value.
Insight into the Simulation Workflow#
During initialization, mutable attributes and harmonizers are initialized, and a dependency tree with mutable elements (such as mutable attributes with different distribution types, expressions with macros, and more) is created based on the description file, and then the USD runtime scene is initialized, loading all the prims that are about to be randomized.
Each frame, all the mutable attributes resolve for their values. Mutable attributes with macros, like channels of color and size in our examples resolve their dependent mutable elements (like macro expressions) recursively. The symbol resolution procedures are totally in description level, so it’s as if we are doing randomization on text; in this stage, the USD environment is not involved.
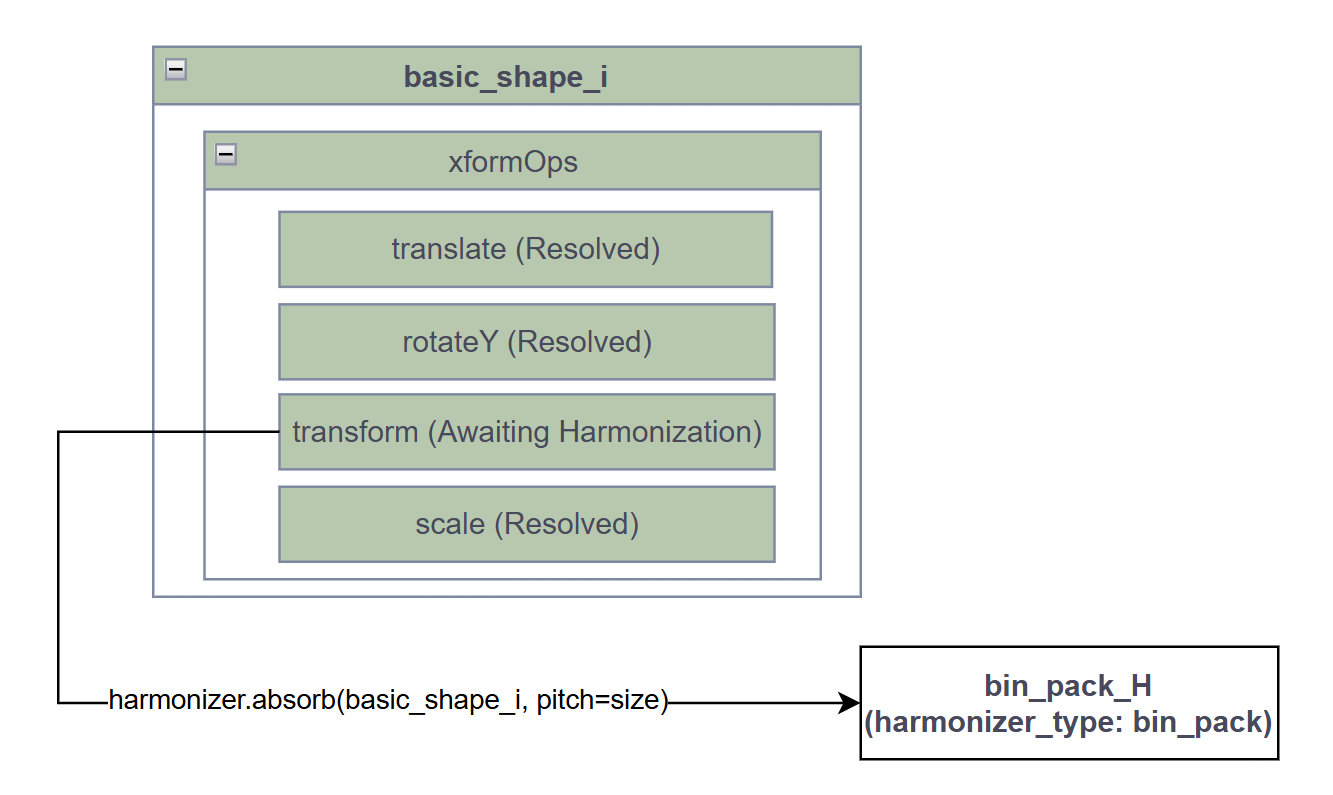
Harmonization Process#
A harmonized mutable attribute is a special mutable attribute that can’t be resolved by running resolution one time, because it needs information from other mutable attributes sharing the same harmonizer. Run it the first time to resolve the symbols, the attribute gets into an AWAITING_HARMONIZATION state, and then the harmonizer absorbs its pitch (in this case, the size of the cube):
All non-harmonized attributes are resolved, which is necessary because harmonized attributes may depend on them. For example, an object can be randomized to use a different USD model with a different size bounding box, which can be the pitch to be absorbed by the harmonizer. The USD runtime is then updated based on non-harmonized attributes.
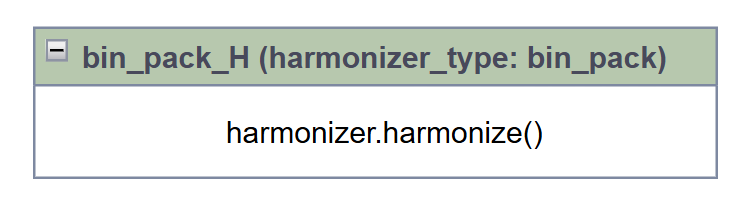
After getting all the information from the harmonized attributes, the harmonizer harmonizes. It now knows where each cube’s local transformations in the big box.
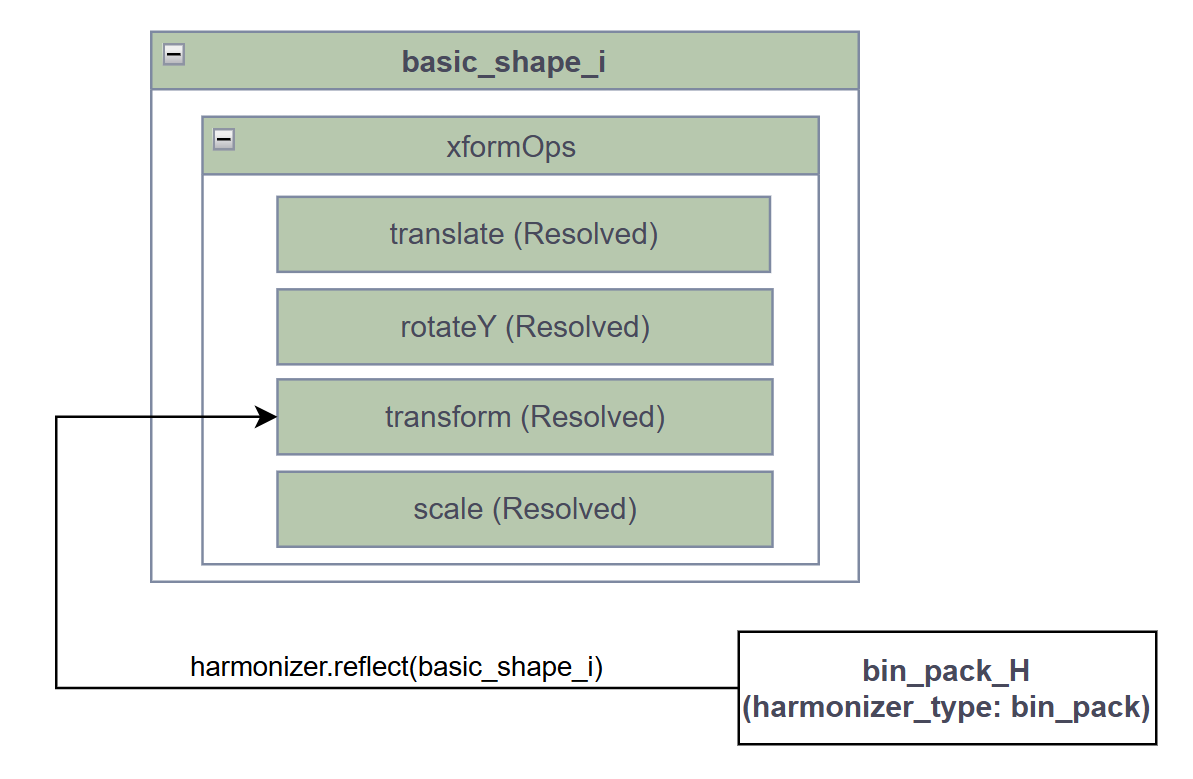
The system is in AWAITING_HARMONIZATION state if there is at least one attribute in this state, which means you need to resolve the whole description again. Now the corresponding values are propagated back to respective harmonized attributes.
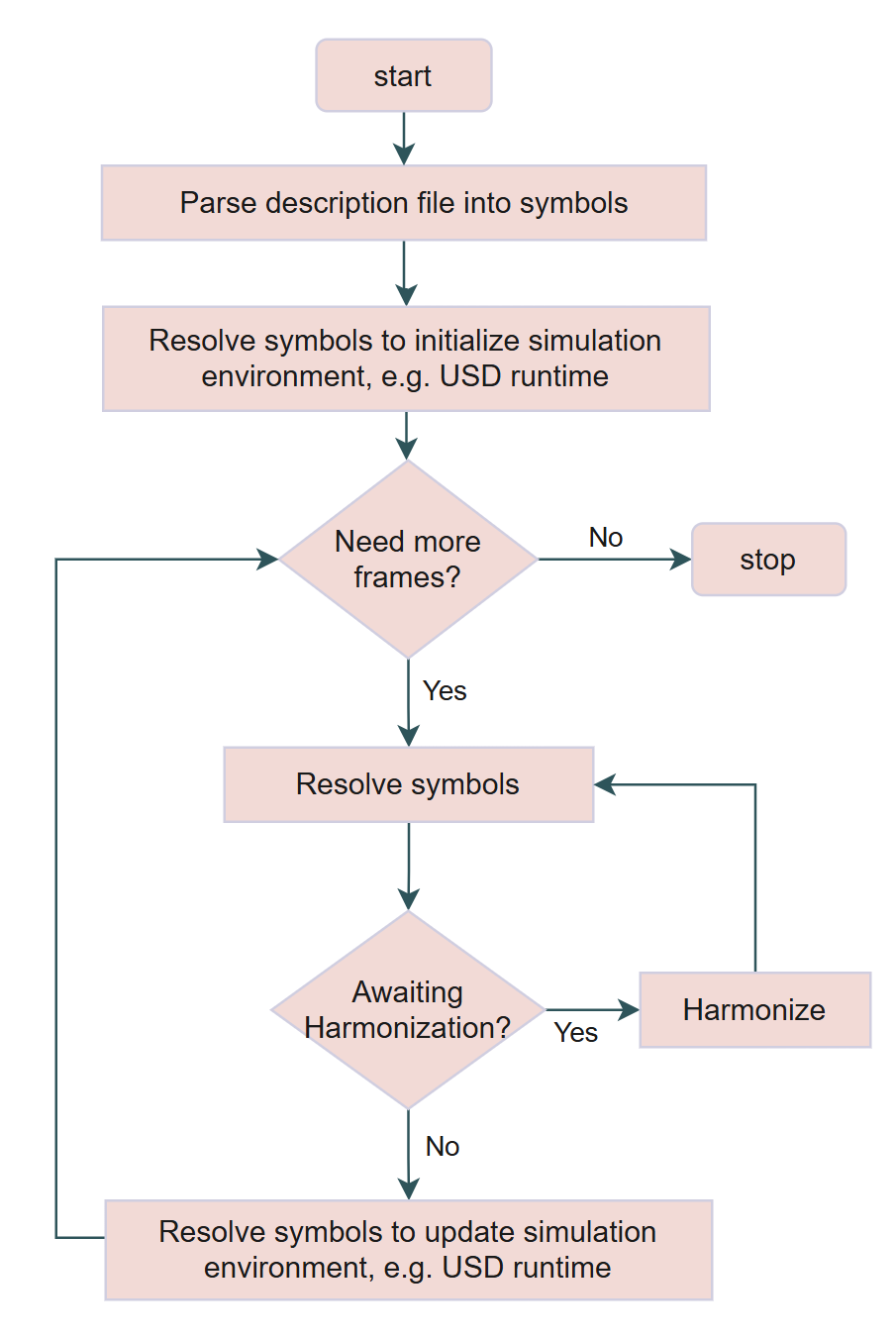
All the numbers are fixed numbers, so you can use them to update the scene again. So, the whole workflow looks like: