Robot Assets#
NVIDIA Isaac Sim supports a wide range of robots with differential bases, form factors, and functions.
These robots can be categorized as wheeled robots, holonomic robots, quadruped robots, robotic manipulator and aerial robots (drones). They can be found in the Content Browser in the Isaac Sim/Robots folder.
Multiphysics Robots#
A growing subset of the robot assets has also been transformed into multiphysics-ready variants that live in a parallel Isaac Sim/Robot_Multiphysics folder, mirroring the directory layout of Isaac Sim/Robots. These transformed assets follow the Asset Structure guidelines and contain only neutral physics primitives, so they can be loaded by the Newton physics backend without PhysX-specific schema contamination.
For each robot in the catalog below that has been transformed, a Multiphysics USD Path is listed alongside the original USD Path (relative to the Isaac Sim/Robot_Multiphysics folder). Entries marked with ![]() have been verified to behave like the original robot; unmarked entries are still undergoing validation and may exhibit issues.
have been verified to behave like the original robot; unmarked entries are still undergoing validation and may exhibit issues.
Users are encouraged to start migrating their workflows to the multiphysics assets. Once conversion and validation is complete across the full catalog, the multiphysics variants will replace the original assets in a future release.

USD Path: Turtlebot/Turtlebot3/turtlebot3_burger.usd#
Multiphysics USD Path: Turtlebot/Turtlebot3/turtlebot3_burger/turtlebot3_burger.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: Apache 2.0

USD Path: NVIDIA/Robomaker/aws_robomaker_jetbot.usd#
Multiphysics USD Path: NVIDIA/Robomaker/aws_robomaker_jetbot/aws_robomaker_jetbot.usda
Properties
Number of Joints |
5 |
Number of Links |
6 |
Number of DOFs |
2 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: MIT

USD Path: NVIDIA/NovaCarter/nova_carter.usd#
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Sensor/Accessory |
Count |
|---|---|
Camera |
12 |
IMU |
5 |
OmniSensor Lidar |
3 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
License: 3D Content Sharing Agreement

USD Path: NVIDIA/Leatherback/leatherback.usd#
Multiphysics USD Path: NVIDIA/Leatherback/leatherback.usda
Properties
Number of Joints |
26 |
Number of Links |
27 |
Number of DOFs |
26 |
Sensors |
Count |
|---|---|
Camera |
4 |
Physics APIs:
PhysX ArticulationAPI
PhysX CollisionAPI
License: NVIDIA

USD Path: NVIDIA/Jetbot/jetbot.usd#
Multiphysics USD Path: NVIDIA/Jetbot/jetbot.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Sensors |
Count |
|---|---|
Camera |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
License: Email confirmation: Jetbot 3D drawing

USD Path: NVIDIA/Carter/carter_v1.usd#
Multiphysics USD Path: NVIDIA/Carter/carter_v1/carter_v1.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
4 |
Sensors |
Count |
|---|---|
Camera |
5 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
License: NVIDIA

USD Path: NVIDIA/Carter/carter_v1_physx_lidar.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
4 |
Sensors |
Count |
|---|---|
Camera |
4 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
License: NVIDIA

USD Path: IsaacSim/ForkliftC/forklift_c.usd#
Multiphysics USD Path: IsaacSim/ForkliftC/forklift_c/forklift_c.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX CollisionAPI

USD Path: IsaacSim/ForkliftB/forklift_b.usd#
Multiphysics USD Path: IsaacSim/ForkliftB/forklift_b/forklift_b.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX CollisionAPI

USD Path: IsaacSim/ForkliftB/forklift_b_sensor.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Sensor/Accessory |
Count |
|---|---|
Camera |
6 |
IMU |
3 |
OmniSensor Lidar |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX CollisionAPI

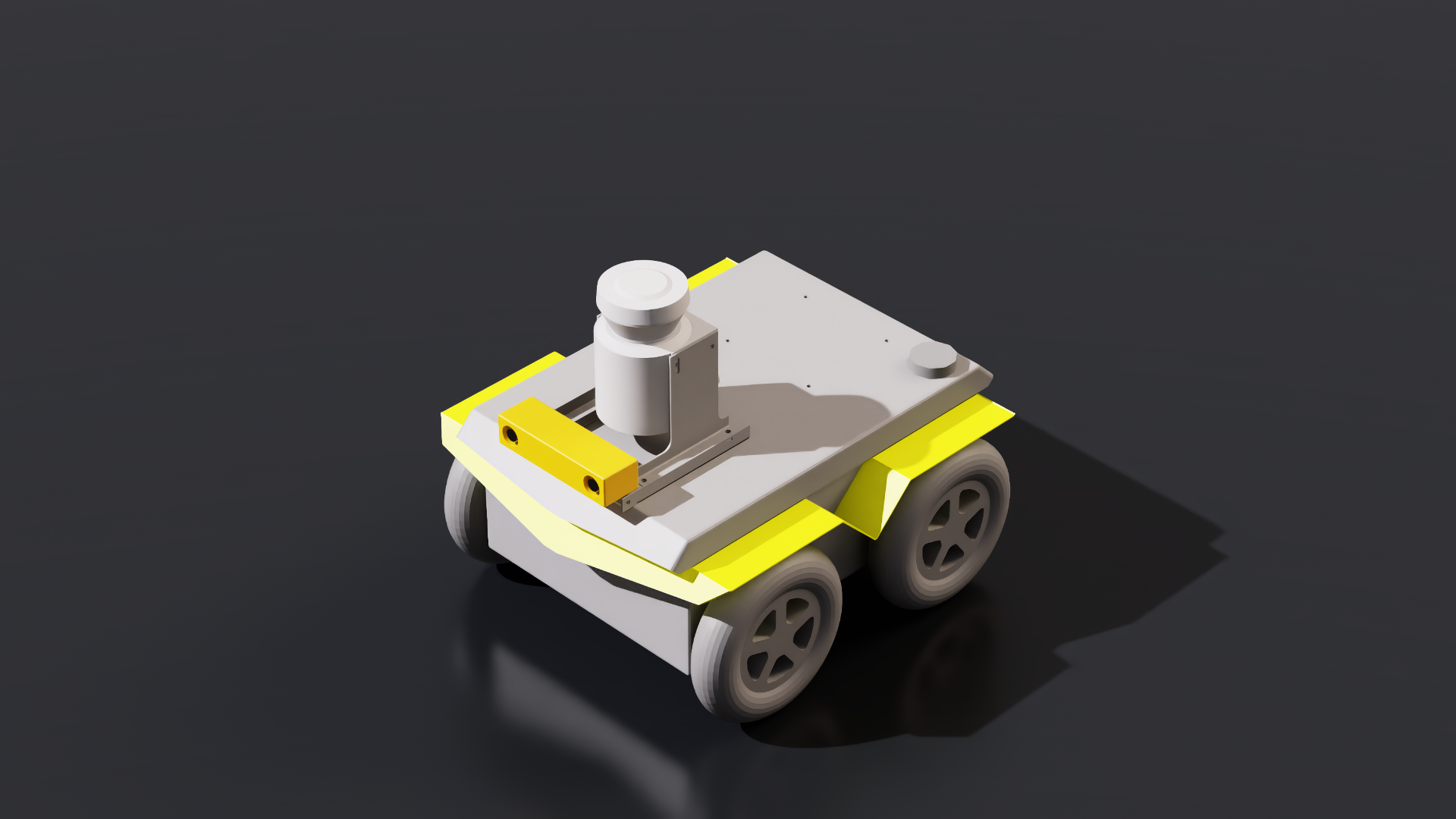
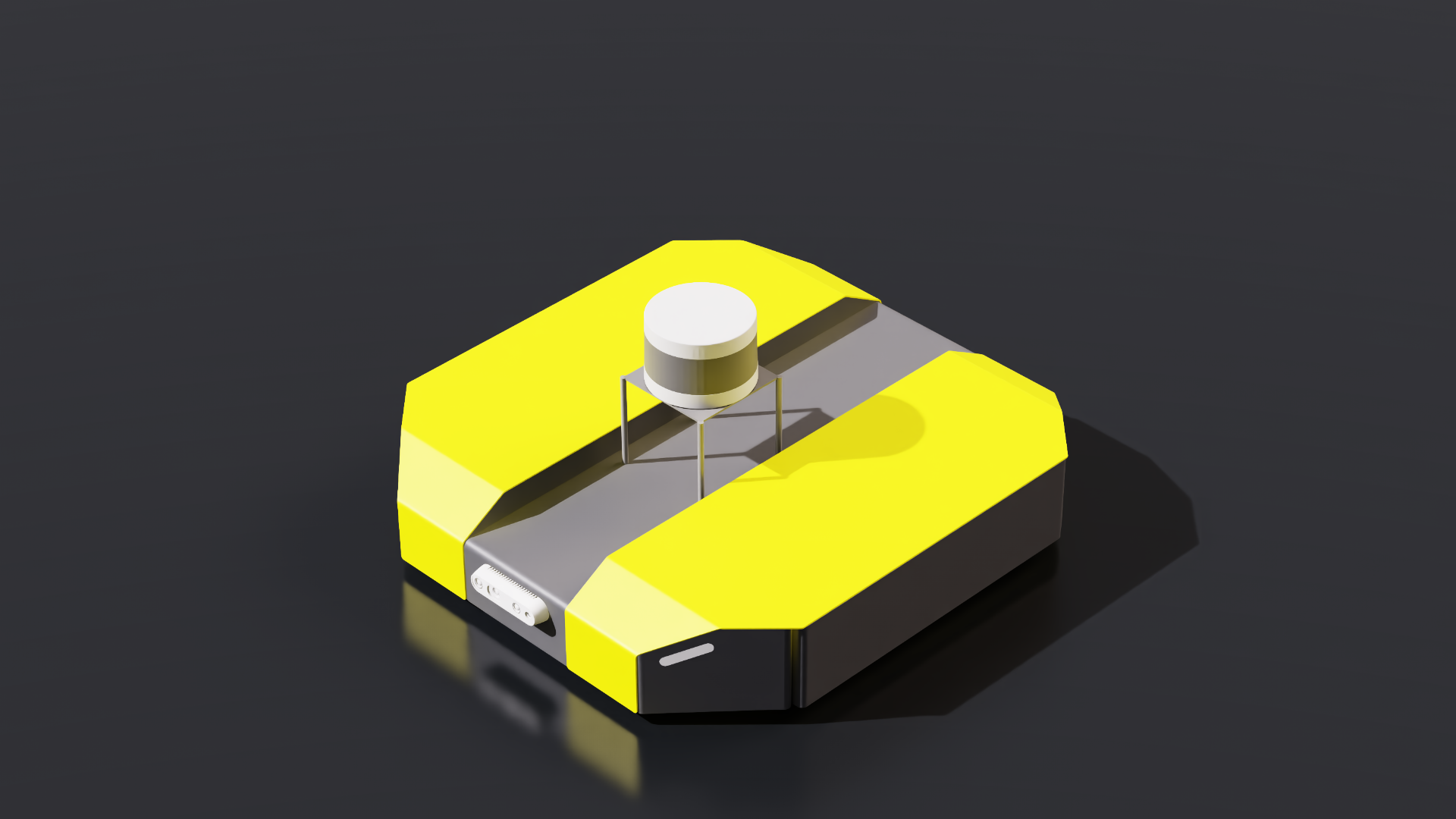
USD Path: Idealworks/iwhub/iw_hub.usd#
Multiphysics USD Path: Idealworks/iwhub/iw_hub/iw_hub.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI

USD Path: Idealworks/iwhub/iw_hub_sensors.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Sensors |
Count |
|---|---|
Camera |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI
PhysX SceneAPI

USD Path: Idealworks/iwhub/iw_hub_static.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |

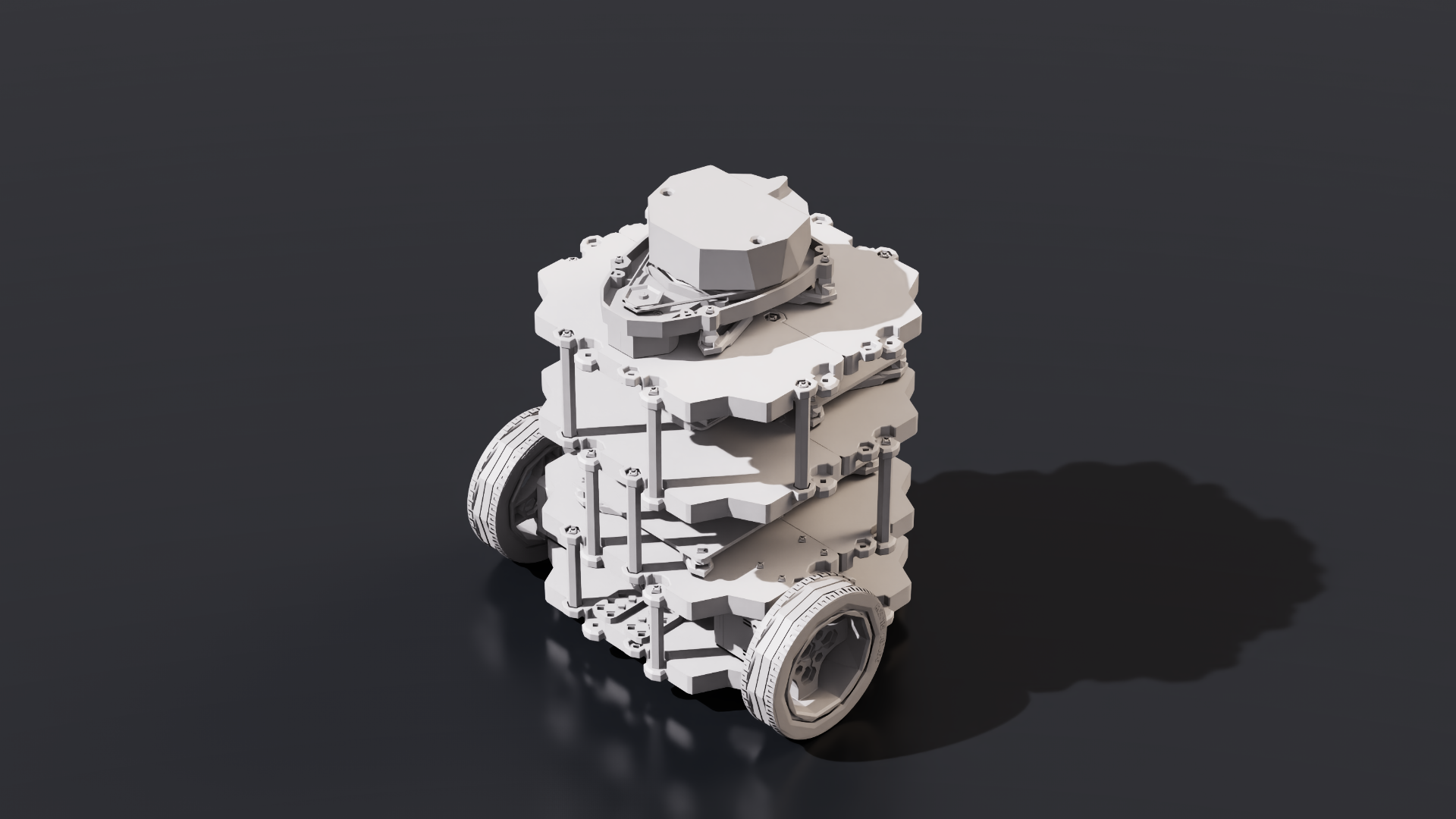
USD Path: Fraunhofer/Evobot/evobot.usd#
Multiphysics USD Path: Fraunhofer/Evobot/evobot.usda
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX ArticulationAPI
PhysX SceneAPI
License: 3D Content Sharing Agreement




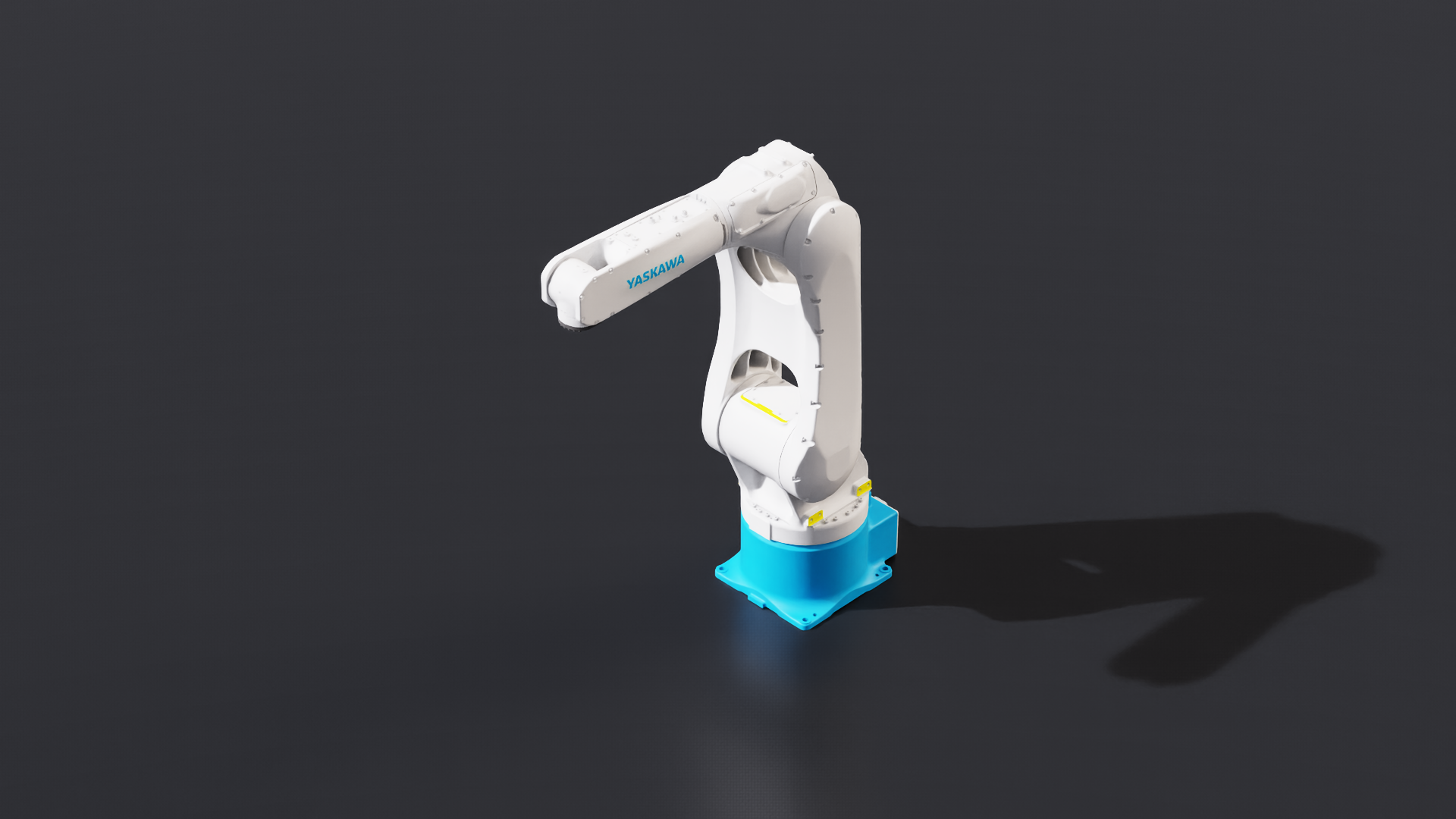
USD Path: Yaskawa/Motoman Next/NHC12/NHC12_A00.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

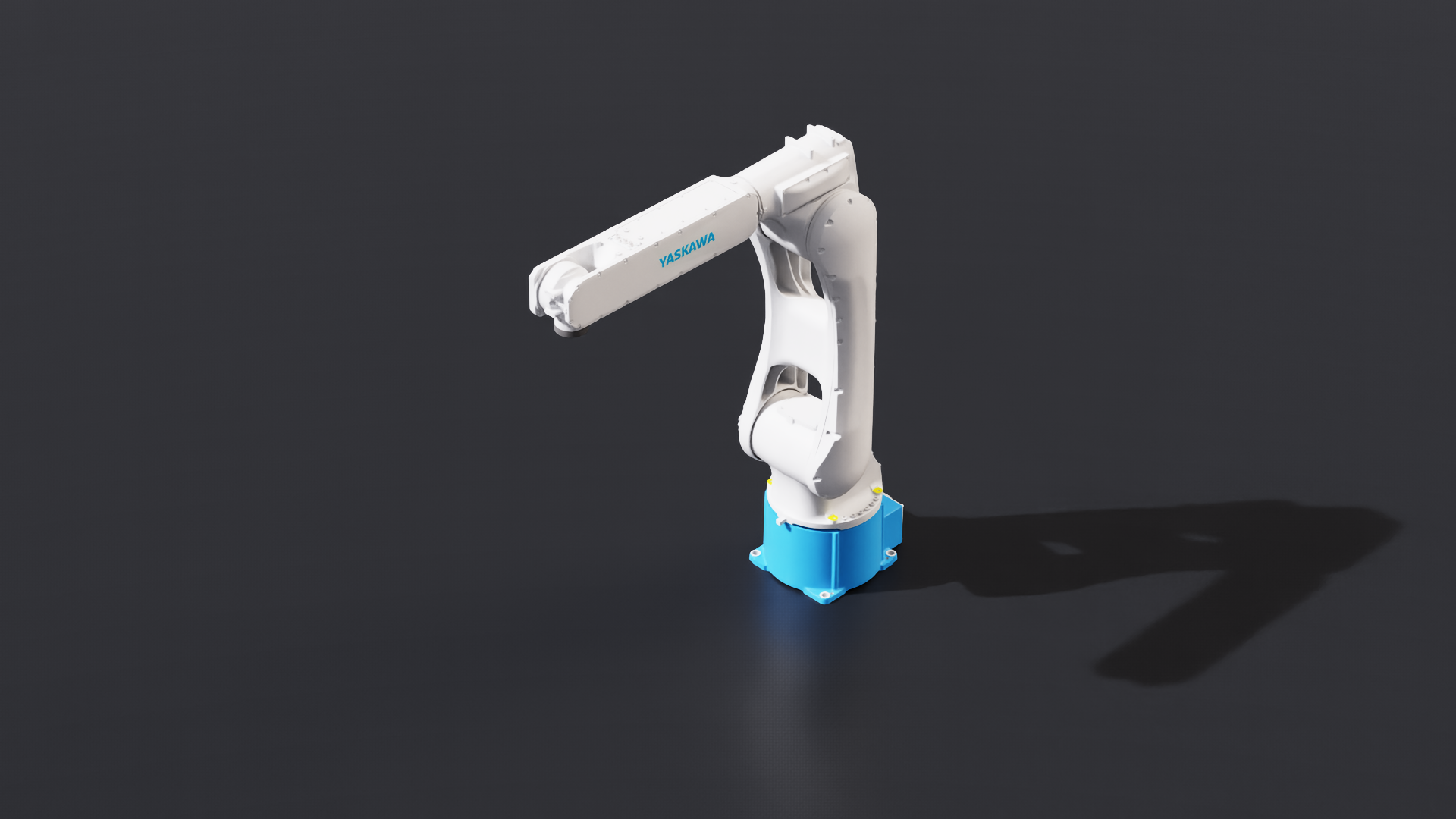
USD Path: Yaskawa/Motoman Next/NEX7/NEX7_C00_c00.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Yaskawa/Motoman Next/NEX4/NEX4_C00.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement
USD Path: Yaskawa/Motoman Next/NEX35/NEX35_C00.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement
USD Path: Yaskawa/Motoman Next/NEX20/NEX20_C00.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Yaskawa/Motoman Next/NEX10/NEX10_C00.usd#
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Yahboom/Dofbot/dofbot.usd#
Multiphysics USD Path: Yahboom/Dofbot/dofbot.usda
Properties
Number of Joints |
11 |
Number of Links |
12 |
Number of DOFs |
11 |
Sensors |
Count |
|---|---|
Camera |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
License: Email confirmation: Yahboom Technology
USD Path: WonikRobotics/AllegroHand/allegro.usd#
Multiphysics USD Path: WonikRobotics/AllegroHand/allegro/allegro.usda
Properties
Number of Joints |
20 |
Number of Links |
21 |
Number of DOFs |
16 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: BSD-2


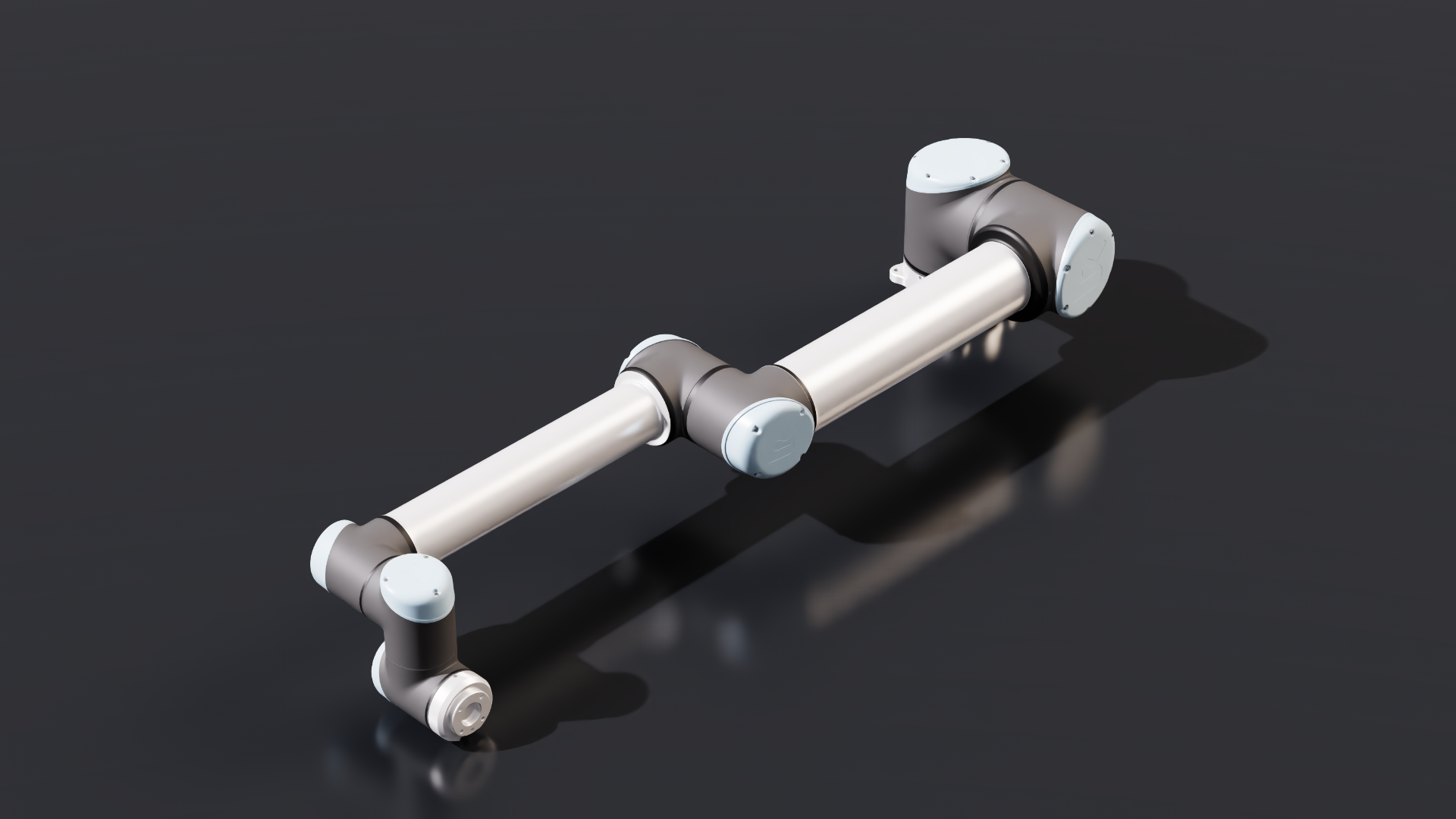
USD Path: UniversalRobots/ur5e/ur5e.usd#
Multiphysics USD Path: UniversalRobots/ur5e/ur5e.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: UniversalRobots/ur5/ur5.usd#
Multiphysics USD Path: UniversalRobots/ur5/ur5.usda ![]()
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: UniversalRobots/ur3e/ur3e.usd#
Multiphysics USD Path: UniversalRobots/ur3e/ur3e.usda ![]()
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: UniversalRobots/ur30/ur30.usd#
Multiphysics USD Path: UniversalRobots/ur30/ur30.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: UniversalRobots/ur3/ur3.usd#
Multiphysics USD Path: UniversalRobots/ur3/ur3.usda ![]()
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: UniversalRobots/ur20/ur20.usd#
Multiphysics USD Path: UniversalRobots/ur20/ur20.usda ![]()
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: UniversalRobots/ur16e/ur16e.usd#
Multiphysics USD Path: UniversalRobots/ur16e/ur16e.usda ![]()
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3


USD Path: Unitree/Z1/z1.usd#
Multiphysics USD Path: Unitree/Z1/z1.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: BSD-3



USD Path: Ufactory/xarm_gripper/xarm_gripper.usd#
Multiphysics USD Path: Ufactory/xarm_gripper/xarm_gripper.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: Ufactory/xarm7/xarm7.usd#
Multiphysics USD Path: Ufactory/xarm7/xarm7.usda
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
13 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: Ufactory/xarm6/xarm6.usd#
Multiphysics USD Path: Ufactory/xarm6/xarm6.usda
Properties
Number of Joints |
13 |
Number of Links |
14 |
Number of DOFs |
12 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: Ufactory/uf850/uf850.usd#
Multiphysics USD Path: Ufactory/uf850/uf850.usda ![]()
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: Ufactory/lite6_gripper/uf_lite_gripper.usd#
Multiphysics USD Path: Ufactory/lite6_gripper/uf_lite_gripper/uf_lite_gripper.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI
PhysX RigidBodyAPI
License: 3D Content Sharing Agreement

USD Path: Ufactory/lite6/lite6.usd#
Multiphysics USD Path: Ufactory/lite6/lite6.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: Techman/TM12/tm12.usd#
Multiphysics USD Path: Techman/TM12/tm12.usda
Properties
Number of Joints |
9 |
Number of Links |
10 |
Number of DOFs |
6 |
Sensors |
Count |
|---|---|
Camera |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: ShadowRobot/ShadowHand/shadow_hand.usd#
Multiphysics USD Path: ShadowRobot/ShadowHand/shadow_hand/shadow_hand.usda
Properties
Number of Joints |
25 |
Number of Links |
26 |
Number of DOFs |
24 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
License: BSD-3

USD Path: ShadowRobot/ShadowHand/shadow_hand_instanceable.usd#
Multiphysics USD Path: ShadowRobot/ShadowHandNewton/shadow_hand_instanceable/shadow_hand_instanceable.usda
Properties
Number of Joints |
25 |
Number of Links |
26 |
Number of DOFs |
24 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab
License: BSD-3
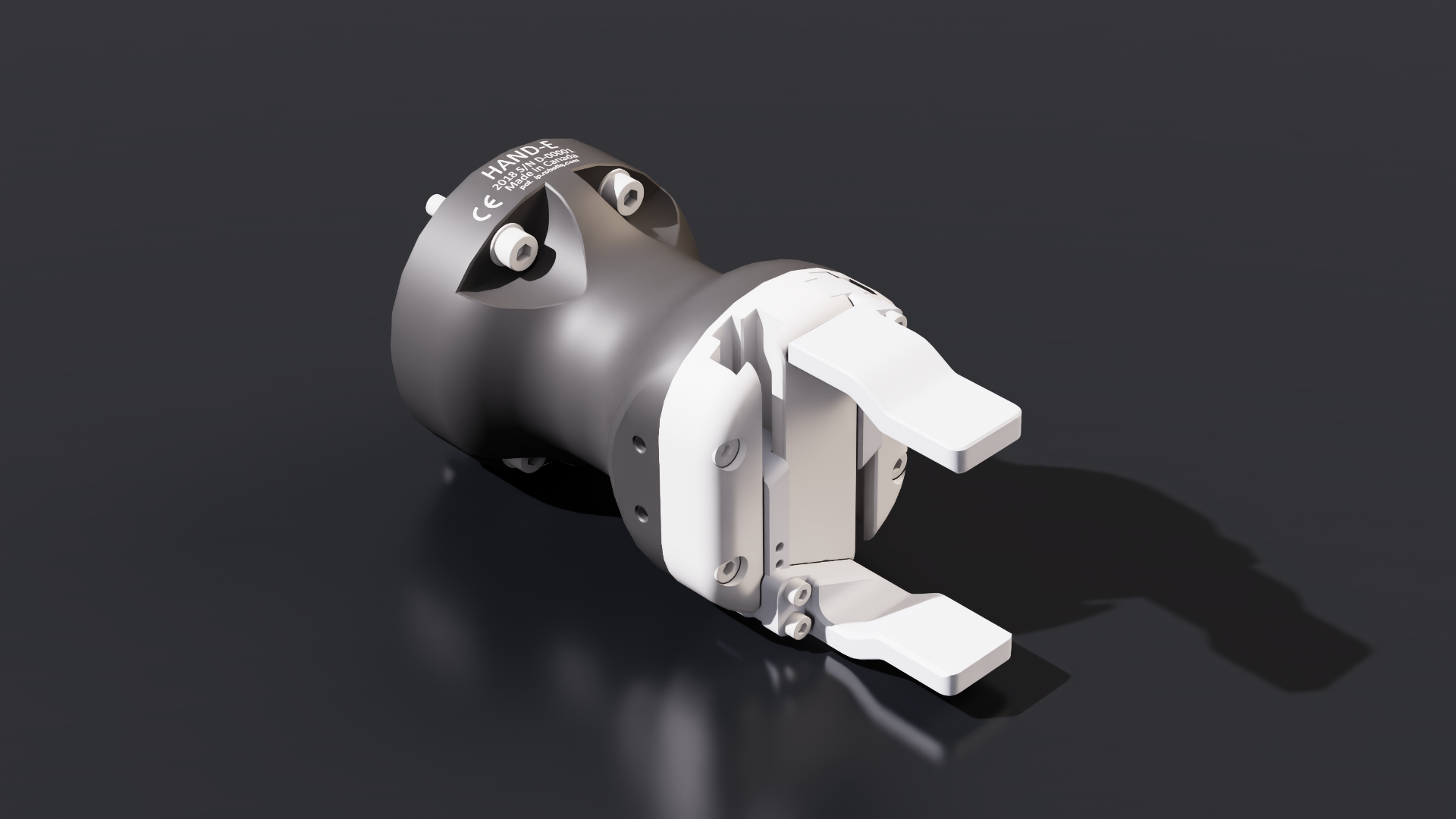
USD Path: Robotiq/Hand-E/Robotiq_Hand_E_base.usd#
Multiphysics USD Path: Robotiq/Hand-E/Robotiq_Hand_E_base/Robotiq_Hand_E_base.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: Robotiq/Hand-E/Robotiq_Hand_E_edit.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

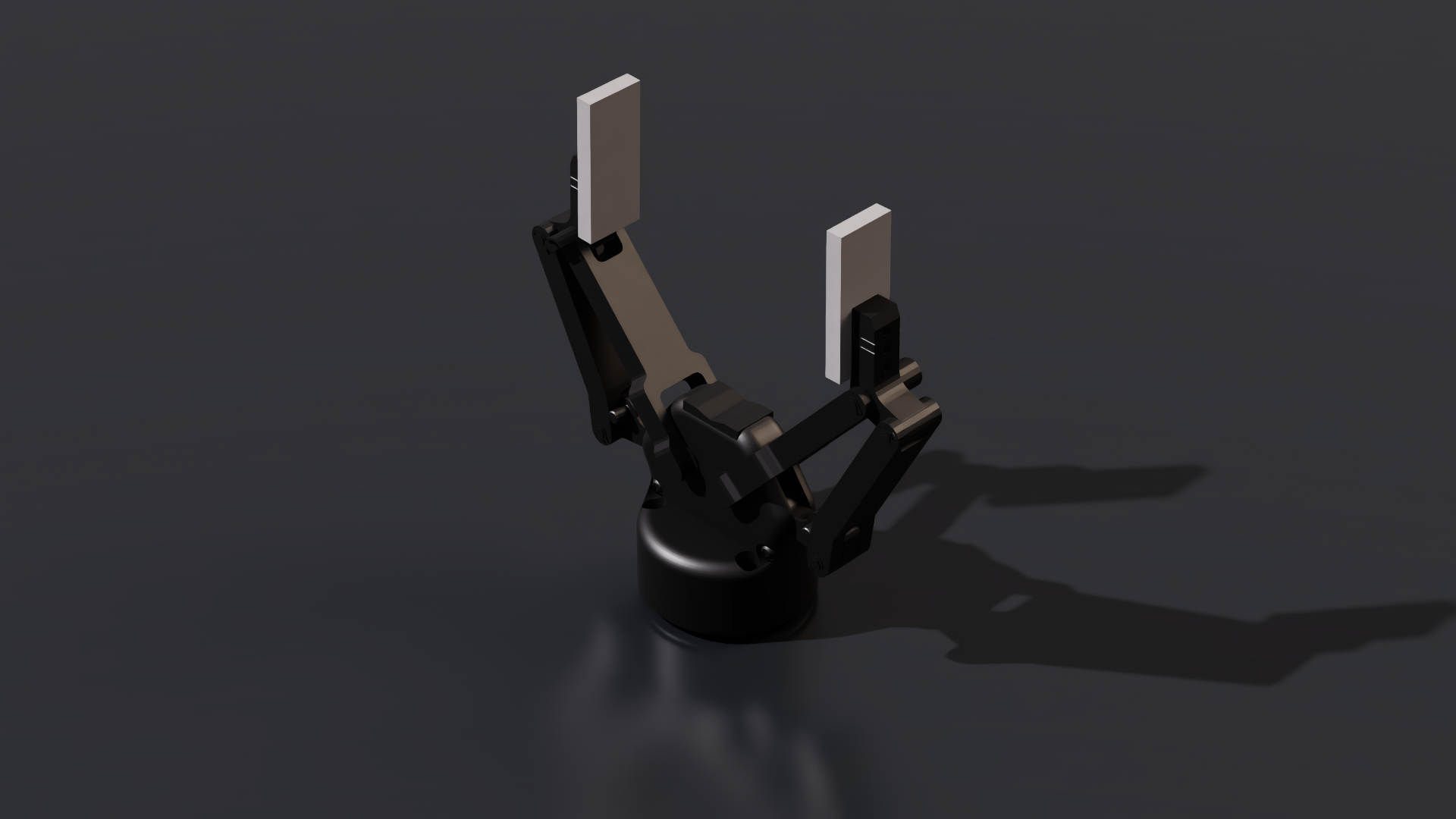
USD Path: Robotiq/2F-85/Robotiq_2F_85_edit.usd#
Multiphysics USD Path: Robotiq/2F-85/Robotiq_2F_85.usda
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
6 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement
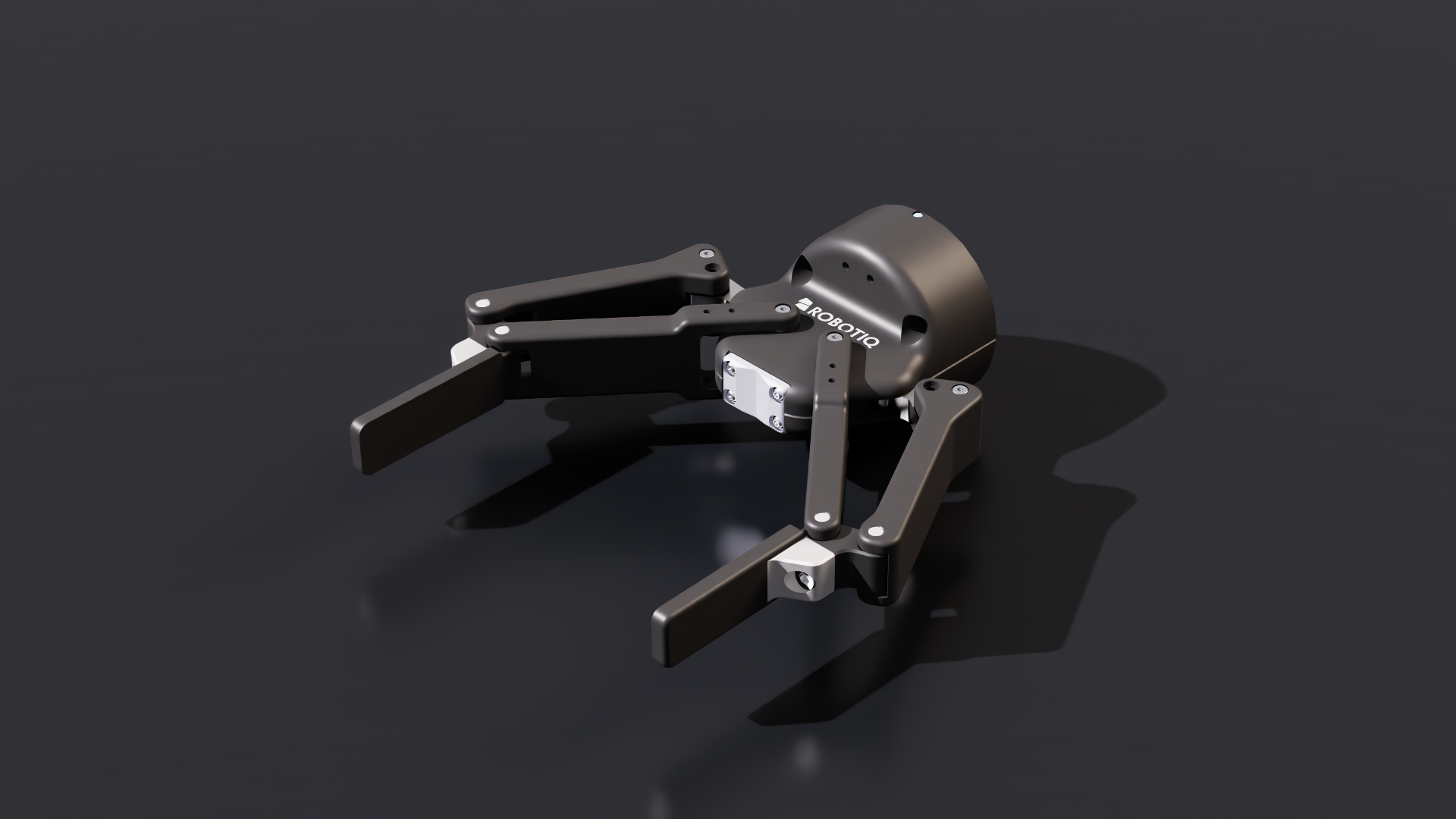
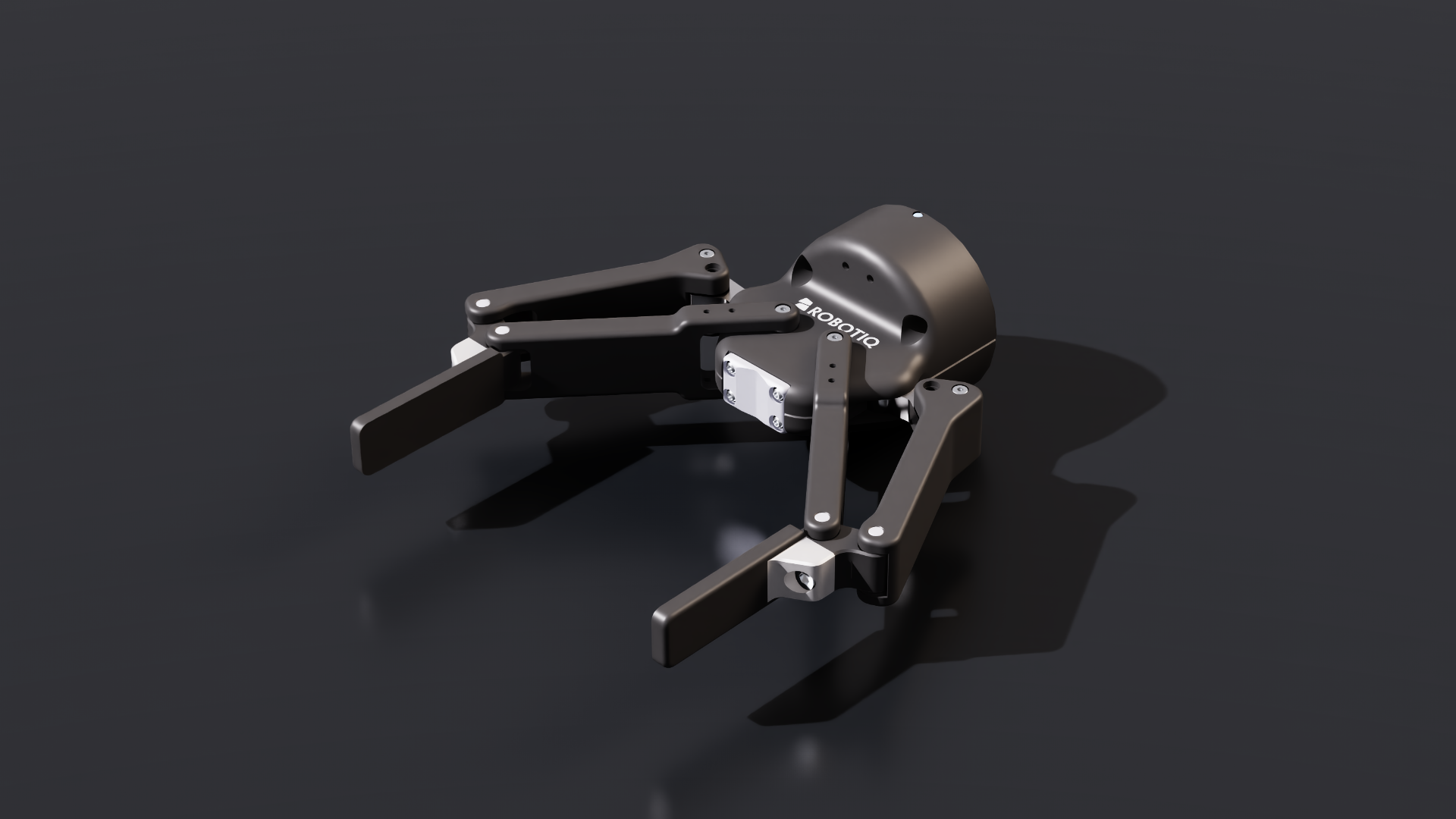
USD Path: Robotiq/2F-140/2f140_instanceable.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Robotiq/2F-140/Robotiq_2F_140_base.usd#
Multiphysics USD Path: Robotiq/2F-140/Robotiq_2F_140.usda
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Physics APIs:
PhysX ArticulationAPI
License: 3D Content Sharing Agreement
USD Path: Robotiq/2F-140/Robotiq_2F_140_config.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
10 |
Sensor/Accessory |
Count |
|---|---|
Contact Sensor |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX SceneAPI
PhysX ResidualReportingAPI
PhysX MimicJointAPI
License: 3D Content Sharing Agreement
USD Path: Robotiq/2F-140/Robotiq_2F_140_physics_edit.usd#
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Sensor/Accessory |
Count |
|---|---|
Contact Sensor |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX MimicJointAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Robotiq/2F-140/Collected_2f140_instanceable/2f140_instanceable.usd#
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
6 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Psyonic/ability_hand_left_large/ability_hand_left_large.usd#
Multiphysics USD Path: Psyonic/ability_hand_left_large/ability_hand_left_large.usda
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
11 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Psyonic/ability_hand_left_small/ability_hand_left_small.usd#
Multiphysics USD Path: Psyonic/ability_hand_left_small/ability_hand_left_small.usda
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
11 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Psyonic/ability_hand_right_large/ability_hand_right_large.usd#
Multiphysics USD Path: Psyonic/ability_hand_right_large/ability_hand_right_large.usda
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
11 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Psyonic/ability_hand_right_small/ability_hand_right_small.usd#
Multiphysics USD Path: Psyonic/ability_hand_right_small/ability_hand_right_small.usda
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
11 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Schunk/egk_25/schunk_egk_25.usd#
Multiphysics USD Path: Schunk/egk_25/schunk_egk_25/schunk_egk_25.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Schunk/egu_50/schunk_egu_50.usd#
Multiphysics USD Path: Schunk/egu_50/schunk_egu_50/schunk_egu_50.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Schunk/ezu_35/schunk_ezu_35.usd#
Multiphysics USD Path: Schunk/ezu_35/schunk_ezu_35/schunk_ezu_35.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

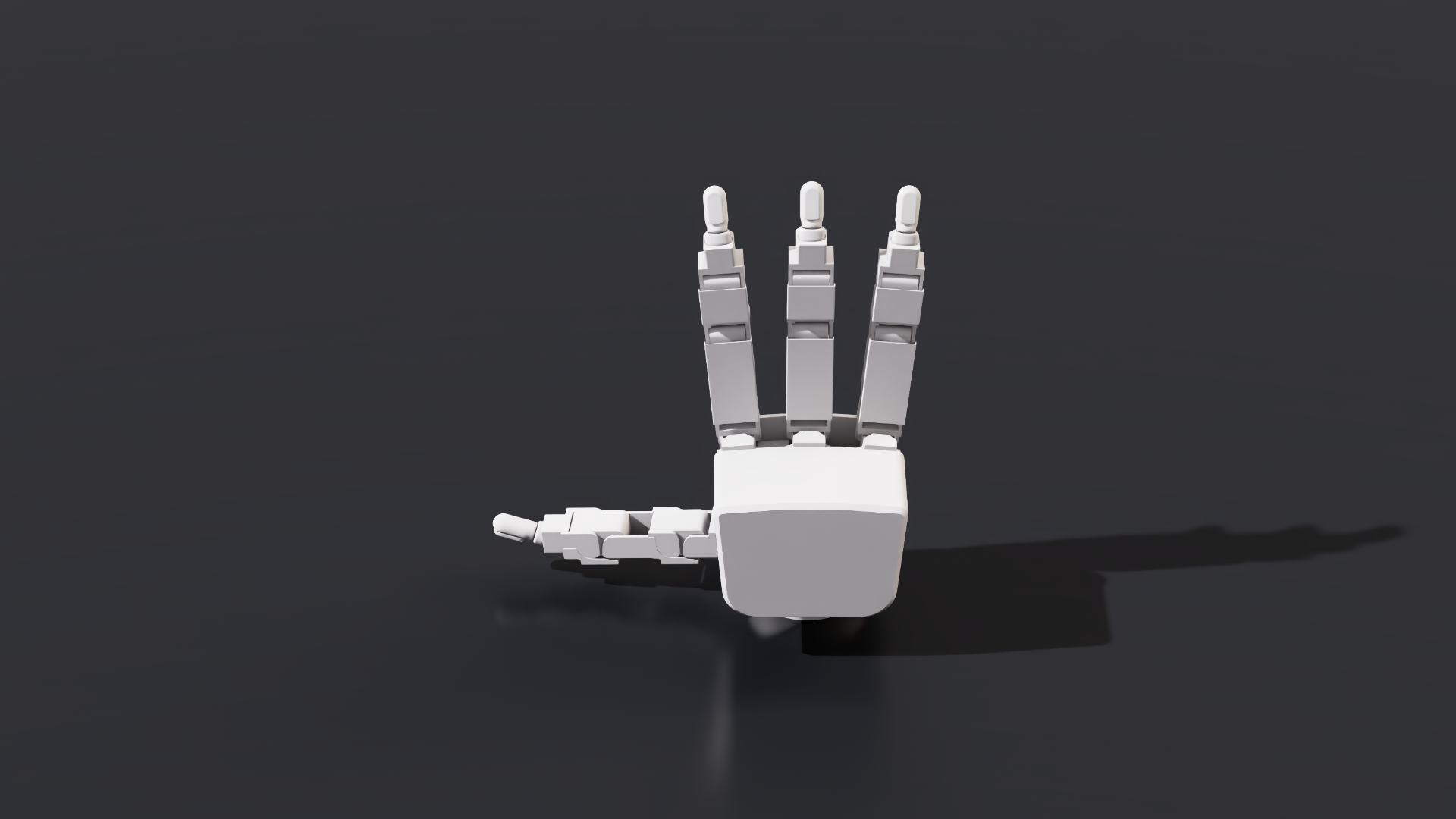
USD Path: Schunk/svh-flat-l/svh-flat-l_v2.usd#
Multiphysics USD Path: Schunk/svh-flat-l/svh-flat-l_v2/svh-flat-l_v2.usda
Properties
Number of Joints |
24 |
Number of Links |
25 |
Number of DOFs |
24 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

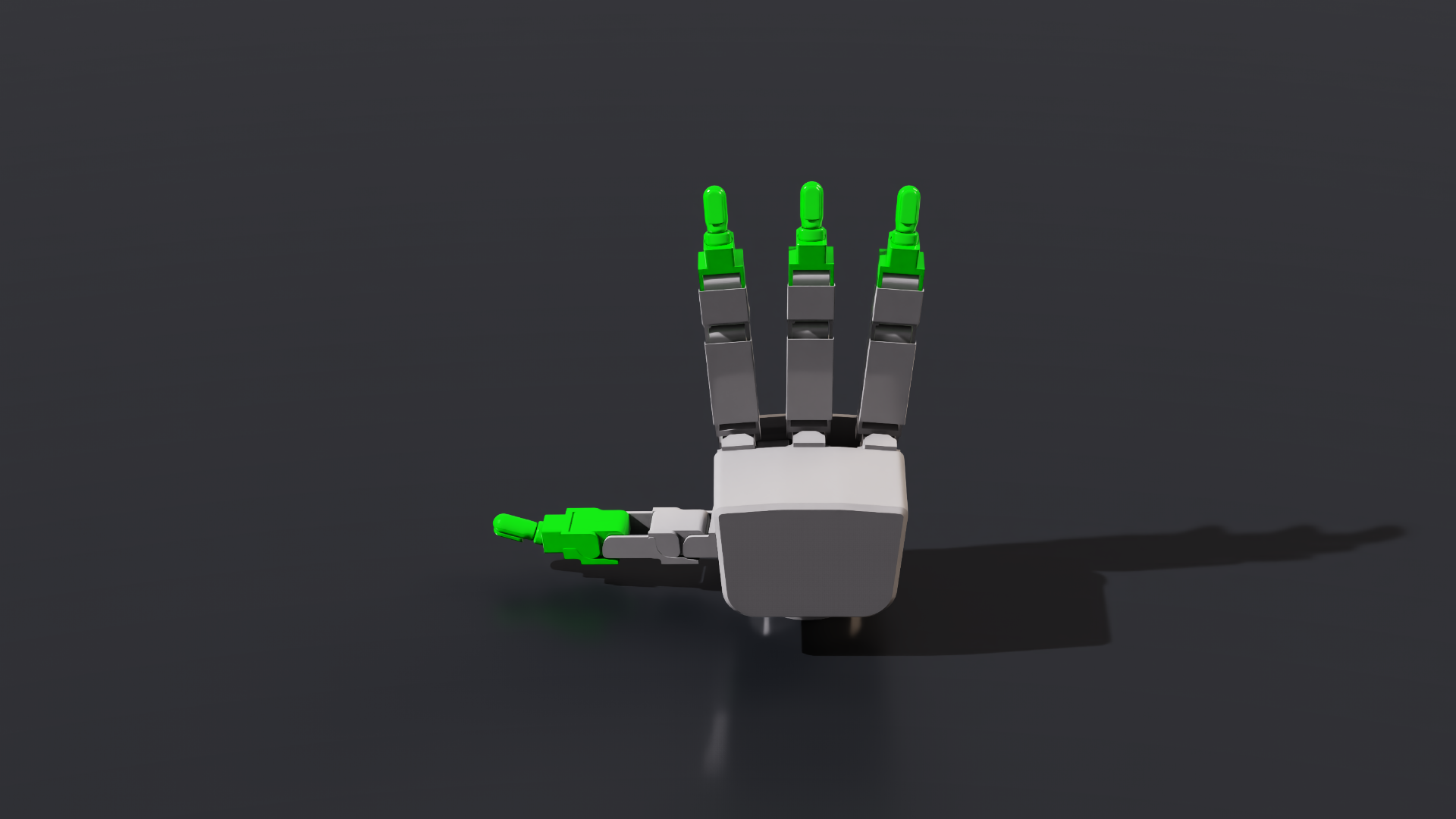
USD Path: Schunk/svh-flat-r/svh-flat-r_v2.usd#
Multiphysics USD Path: Schunk/svh-flat-r/svh-flat-r_v2/svh-flat-r_v2.usda
Properties
Number of Joints |
24 |
Number of Links |
25 |
Number of DOFs |
24 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: RobotStudio/so101_new_calib/so101_new_calib.usd#
Multiphysics USD Path: RobotStudio/so101_new_calib/so101_new_calib.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: Apache 2.0

USD Path: RobotStudio/so100/so100.usd#
Multiphysics USD Path: RobotStudio/so100/so100.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: Apache 2.0

USD Path: RethinkRobotics/Sawyer/sawyer_instanceable.usd#
Multiphysics USD Path: RethinkRobotics/Sawyer/sawyer_instanceable/sawyer_instanceable.usda
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
8 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab
License: Apache 2.0

USD Path: Kuka/KR210_L150/kr210_l150.usd#
Multiphysics USD Path: Kuka/KR210_L150/kr210_l150.usda
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: Apache 2.0

USD Path: Kinova/Jaco2/J2N7S300/j2n7s300_instanceable.usd#
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
13 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Kinova/Jaco2/J2N6S300/j2n6s300_instanceable.usd#
Properties
Number of Joints |
13 |
Number of Links |
14 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
USD Path: Kinova/Gen3/gen3n7_instanceable.usd#
Multiphysics USD Path: Kinova/Gen3/gen3n7_instanceable/gen3n7_instanceable.usda
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Kawasaki/RS080N/rs080n_onrobot_rg2.usd#
Multiphysics USD Path: Kawasaki/RS080N/rs080n_onrobot_rg2/rs080n_onrobot_rg2.usda
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Kawasaki/RS025N/rs025n_onrobot_rg2.usd#
Multiphysics USD Path: Kawasaki/RS025N/rs025n_onrobot_rg2/rs025n_onrobot_rg2.usda
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Kawasaki/RS013N/rs013n_onrobot_rg2.usd#
Multiphysics USD Path: Kawasaki/RS013N/rs013n_onrobot_rg2/rs013n_onrobot_rg2.usda
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Kawasaki/RS007N/rs007n_onrobot_rg2.usd#
Multiphysics USD Path: Kawasaki/RS007N/rs007n_onrobot_rg2/rs007n_onrobot_rg2.usda
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Kawasaki/RS007L/rs007l_onrobot_rg2.usd#
Multiphysics USD Path: Kawasaki/RS007L/rs007l_onrobot_rg2/rs007l_onrobot_rg2.usda
Properties
Number of Joints |
15 |
Number of Links |
16 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: FrankaRobotics/FrankaPanda/franka.usd#
Multiphysics USD Path: FrankaRobotics/FrankaPanda/franka/franka.usda
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
9 |
Accessories:
AlternateFinger
Default
Robotiq_2F_85
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX RigidBodyAPI
License: Apache 2.0

USD Path: FrankaRobotics/FrankaFR3/fr3.usd#
Multiphysics USD Path: FrankaRobotics/FrankaFR3/fr3/fr3.usda
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
9 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: Apache 2.0

USD Path: FrankaRobotics/FrankaEmika/panda_instanceable.usd#
Multiphysics USD Path: FrankaRobotics/FrankaEmika/panda_instanceable/panda_instanceable.usda
Properties
Number of Joints |
10 |
Number of Links |
11 |
Number of DOFs |
9 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: Apache 2.0

USD Path: FrankaRobotics/FactoryFranka/factory_franka.usd#
Multiphysics USD Path: FrankaRobotics/FactoryFranka/factory_franka/factory_franka.usda
Properties
Number of Joints |
11 |
Number of Links |
12 |
Number of DOFs |
9 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
License: Apache 2.0

USD Path: FrankaRobotics/FactoryFranka/factory_franka_instanceable.usd#
Properties
Number of Joints |
11 |
Number of Links |
12 |
Number of DOFs |
9 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
License: Apache 2.0

USD Path: Flexiv/Rizon4/flexiv_rizon4.usd#
Multiphysics USD Path: Flexiv/Rizon4/flexiv_rizon4/flexiv_rizon4.usda
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
7 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/crx10ial_l/crx10ial_l.usd#
Multiphysics USD Path: Fanuc/crx10ia_l/crx10ia_l.usda ![]()
Properties
Number of Joints |
9 |
Number of Links |
10 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/cr_50f_16b/cr_50f_16b.usd#
Multiphysics USD Path: Fanuc/cr_50f_16b/cr_50f_16b.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/crx10ia/crx10ia.usd#
Multiphysics USD Path: Fanuc/crx10ia/crx10ia.usda ![]()
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/crx5ia/crx5ia.usd#
Multiphysics USD Path: Fanuc/crx5ia/crx5ia.usda ![]()
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/lrmate200id/lrmate200id.usd#
Multiphysics USD Path: Fanuc/lrmate200id/lrmate200id.usda ![]()
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/m710ic_50/m710ic_50.usd#
Multiphysics USD Path: Fanuc/m710ic_50/m710ic_50.usda ![]()
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/r2000ic_165f/r2000ic_165f.usd#
Multiphysics USD Path: Fanuc/r2000ic_165f/r2000ic_165f.usda ![]()
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/sr12ia/sr12ia.usd#
Multiphysics USD Path: Fanuc/sr12ia/sr12ia.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/sr3ia/sr3ia.usd#
Multiphysics USD Path: Fanuc/sr3ia/sr3ia.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Fanuc/m900ib280/m900ib280.usd#
Multiphysics USD Path: Fanuc/m900ib280/m900ib280.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement
Note
Additional FANUC robot assets (84+ models) can be found in the Content Browser at IsaacSim/Robots/Fanuc. Multiphysics-ready counterparts for most of these models are also available at IsaacSim/Robot_Multiphysics/Fanuc (see Multiphysics Robots).

USD Path: Denso/CobottaPro900/cobotta_pro_900.usd#
Multiphysics USD Path: Denso/CobottaPro900/cobotta_pro_900/cobotta_pro_900.usda
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement
USD Path: Denso/CobottaPro1300/cobotta_pro_1300.usd#
Multiphysics USD Path: Denso/CobottaPro1300/cobotta_pro_1300/cobotta_pro_1300.usda
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX MimicJointAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: comau/n-220-27/n-220-27.usd#
Multiphysics USD Path: comau/n-220-27/n-220-27.usda
Properties
Number of Joints |
7 |
Number of Links |
8 |
Number of DOFs |
6 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Addverb/Syncro5.usd#
Multiphysics USD Path: Addverb/Syncro5/Syncro5.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
License: 3D Content Sharing Agreement

USD Path: Addverb/Syncro10.usd#
Multiphysics USD Path: Addverb/Syncro10/Syncro10.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
License: 3D Content Sharing Agreement
USD Path: Mecademic/meca500.usd#
Multiphysics USD Path: Mecademic/meca500/meca500.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
License: Apache 2.0

USD Path: OpenArm/openarm_unimanual/openarm_unimanual.usd#
Multiphysics USD Path: OpenArm/openarm_unimanual/openarm_unimanual.usda
Properties
Number of Joints |
11 |
Number of Links |
12 |
Number of DOFs |
11 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
PhysX MimicJointAPI
License: Apache 2.0

USD Path: OpenArm/openarm_bimanual/openarm_bimanual.usd#
Multiphysics USD Path: OpenArm/openarm_bimanual/openarm_bimanual.usda
Properties
Number of Joints |
22 |
Number of Links |
23 |
Number of DOFs |
22 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
PhysX MimicJointAPI
License: Apache 2.0

USD Path: XiaoPeng/PX5/px5.usd#
Multiphysics USD Path: XiaoPeng/PX5/px5.usda
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
16 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement
USD Path: XiaoPeng/PX5/px5_without_housing.usd#
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
16 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: XHumanoid/Tien Kung/tienkung.usd#
Multiphysics USD Path: XHumanoid/Tien Kung/tienkung/tienkung.usda
Properties
Number of Joints |
59 |
Number of Links |
60 |
Number of DOFs |
54 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
License: 3D Content Sharing Agreement
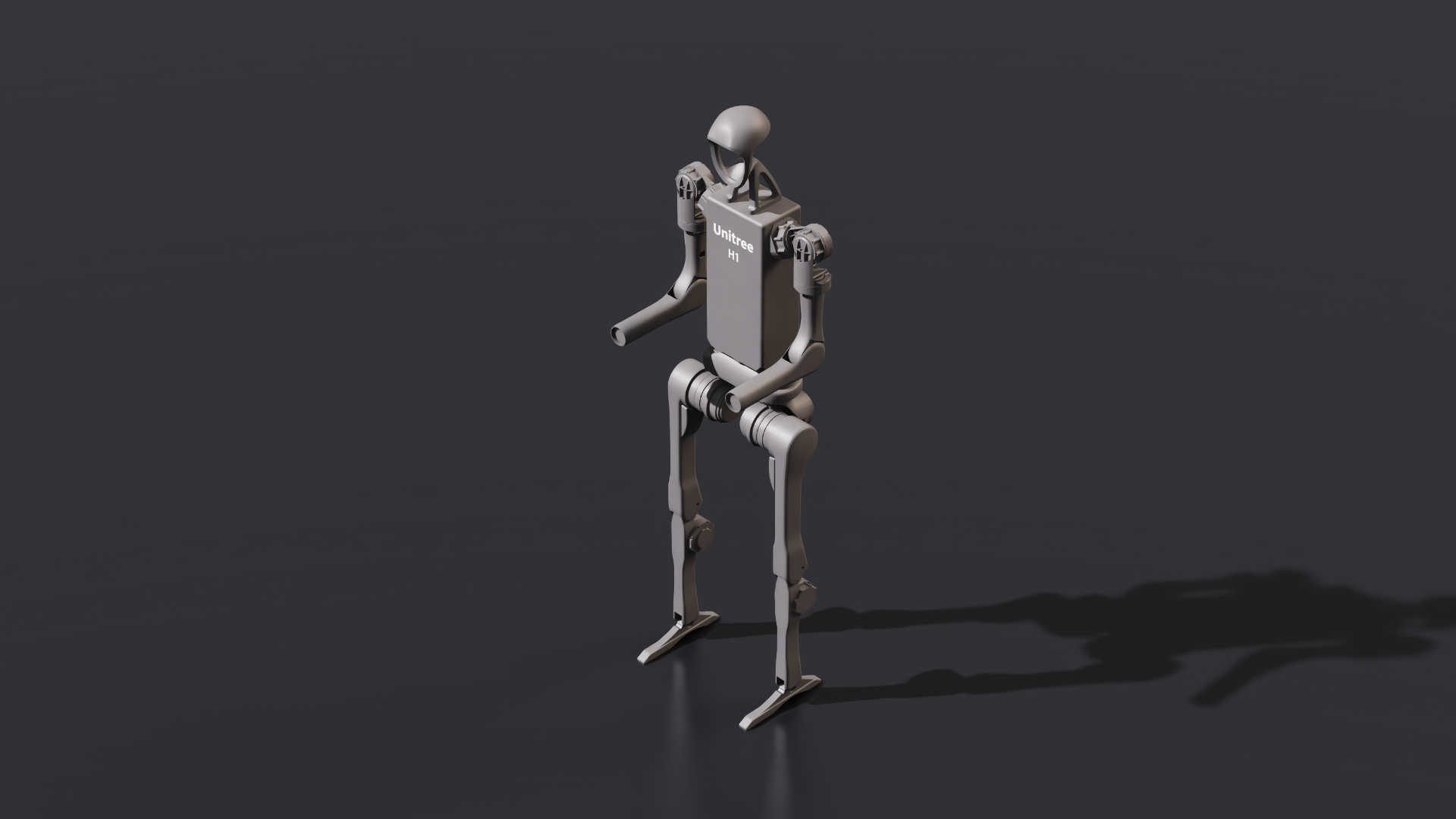
USD Path: Unitree/H1/h1.usd#
Multiphysics USD Path: Unitree/H1/h1.usda
Properties
Number of Joints |
24 |
Number of Links |
25 |
Number of DOFs |
19 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: BSD-3




USD Path: SanctuaryAI/Phoenix/phoenix.usd#
Multiphysics USD Path: SanctuaryAI/Phoenix/phoenix.usda
Properties
Number of Joints |
77 |
Number of Links |
78 |
Number of DOFs |
77 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: RobotEra/STAR1/star1.usd#
Multiphysics USD Path: RobotEra/STAR1/star1.usda
Properties
Number of Joints |
55 |
Number of Links |
56 |
Number of DOFs |
55 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: Ihmcrobotics/Valkyrie/valkyrie.usd#
Multiphysics USD Path: Ihmcrobotics/Valkyrie/valkyrie.usda
Properties
Number of Joints |
25 |
Number of Links |
26 |
Number of DOFs |
25 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: Apache 2.0
USD Path: FourierIntelligence/GR-1/GR1T2_fourier_hand_6dof/GR1T2_fourier_hand_6dof.usd#
Properties
Number of Joints |
54 |
Number of Links |
55 |
Number of DOFs |
54 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX SceneAPI
PhysX ArticulationAPI
This robot is in Isaac Lab
License: 3D Content Sharing Agreement

USD Path: FourierIntelligence/GR-1/GR1T1/GR1_T1.usd#
Properties
Number of Joints |
40 |
Number of Links |
41 |
Number of DOFs |
32 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Agility/Digit/digit_v4.usd#
Multiphysics USD Path: Agility/Digit/digit_v4/digit_v4.usda
Properties
Number of Joints |
42 |
Number of Links |
43 |
Number of DOFs |
38 |
Sensors |
Count |
|---|---|
Camera |
4 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX ArticulationAPI
This robot is in Isaac Lab
License: 3D Content Sharing Agreement

USD Path: Agility/Cassie/cassie.usd#
Multiphysics USD Path: Agility/Cassie/cassie.usda
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
14 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
License: 3D Content Sharing Agreement

USD Path: Agibot/A2D/A2D.usd#
Multiphysics USD Path: Agibot/A2D/A2D.usda
Properties
Number of Joints |
34 |
Number of Links |
35 |
Number of DOFs |
34 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

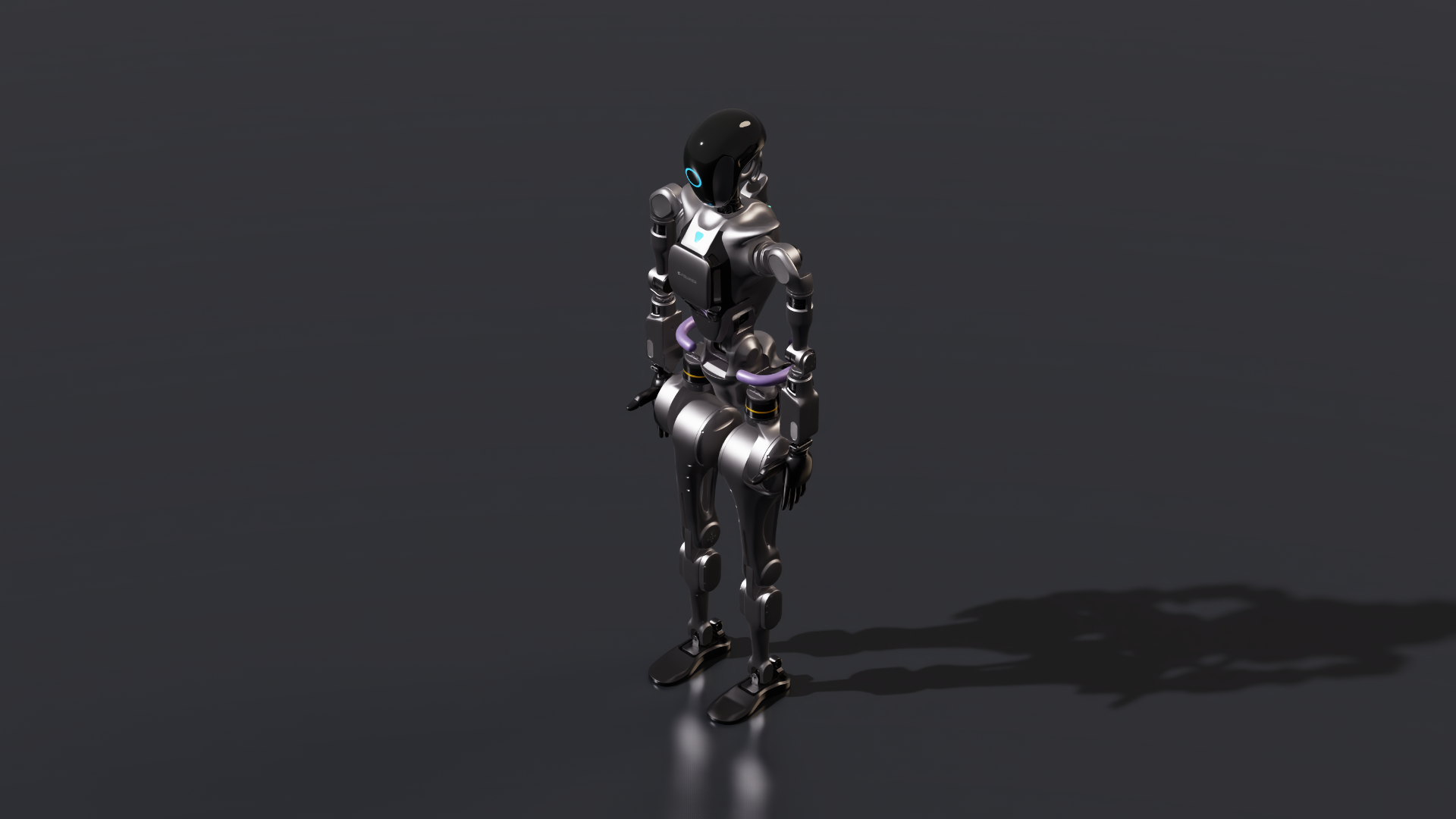
USD Path: 1X/Neo/Neo.usd#
Multiphysics USD Path: 1X/Neo/Neo.usda
Properties
Number of Joints |
33 |
Number of Links |
34 |
Number of DOFs |
33 |
Physics APIs:
PhysX MimicJointAPI
PhysX JointAPI
PhysX ArticulationAPI
License: 3D Content Sharing Agreement

USD Path: BoosterRobotics/BoosterT1/T1_locomotion.usd#
Multiphysics USD Path: BoosterRobotics/BoosterT1/T1_locomotion/T1_locomotion.usda
Properties
Number of Joints |
23 |
Number of Links |
24 |
Number of DOFs |
23 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: Apache 2.0

USD Path: Unitree/laikago/laikago.usd#
Multiphysics USD Path: Unitree/laikago/laikago.usda ![]()
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
12 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: Unitree/aliengo/aliengo.usd#
Multiphysics USD Path: Unitree/aliengo/aliengo.usda ![]()
Properties
Number of Joints |
12 |
Number of Links |
13 |
Number of DOFs |
12 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

USD Path: Unitree/Go2/go2.usd#
Multiphysics USD Path: Unitree/Go2/go2.usda ![]()
Properties
Number of Joints |
38 |
Number of Links |
39 |
Number of DOFs |
12 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: BSD-3




USD Path: IsaacSim/Ant/ant.usd#
Multiphysics USD Path: IsaacSim/Ant/ant.usda
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: MIT



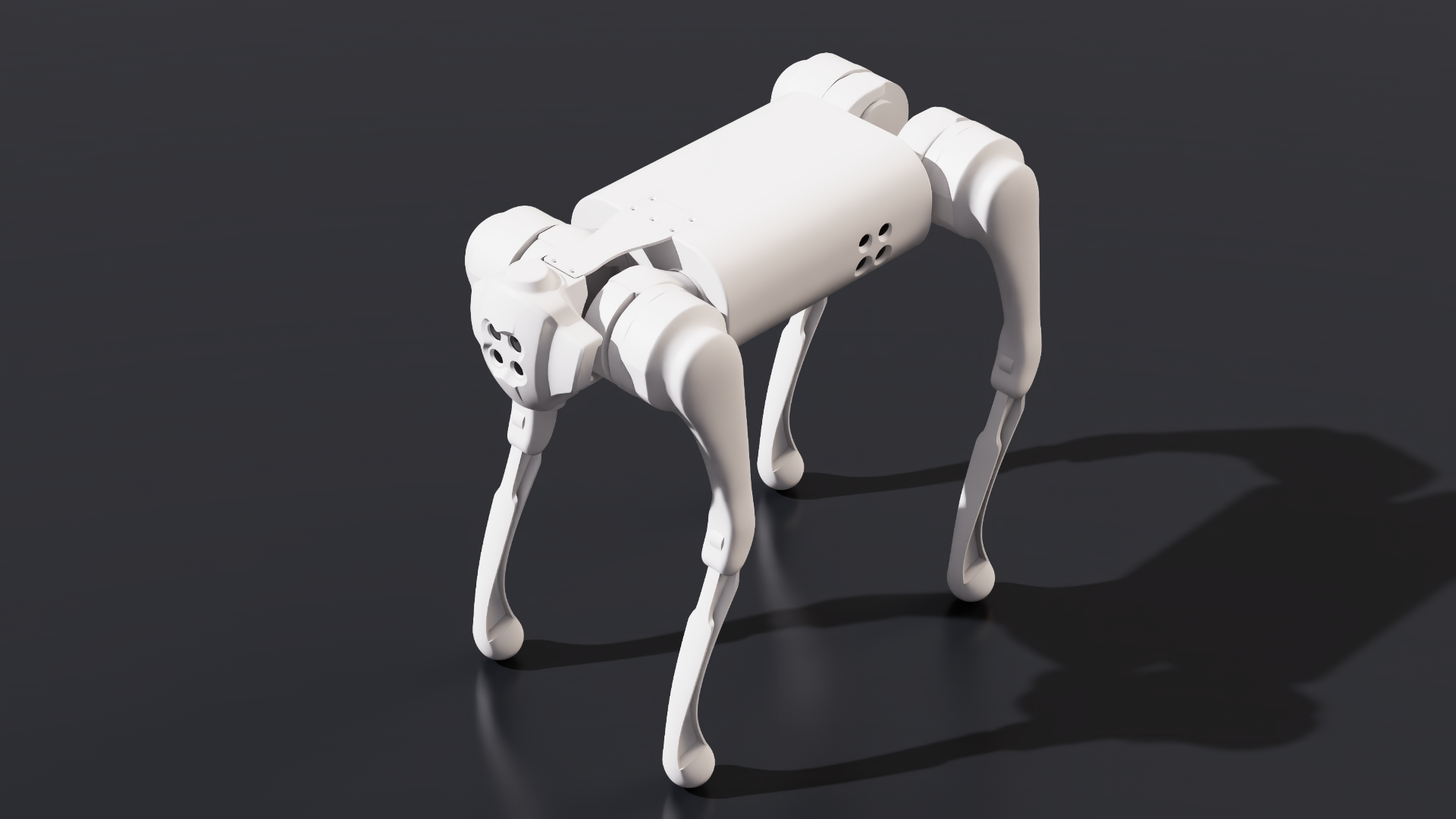
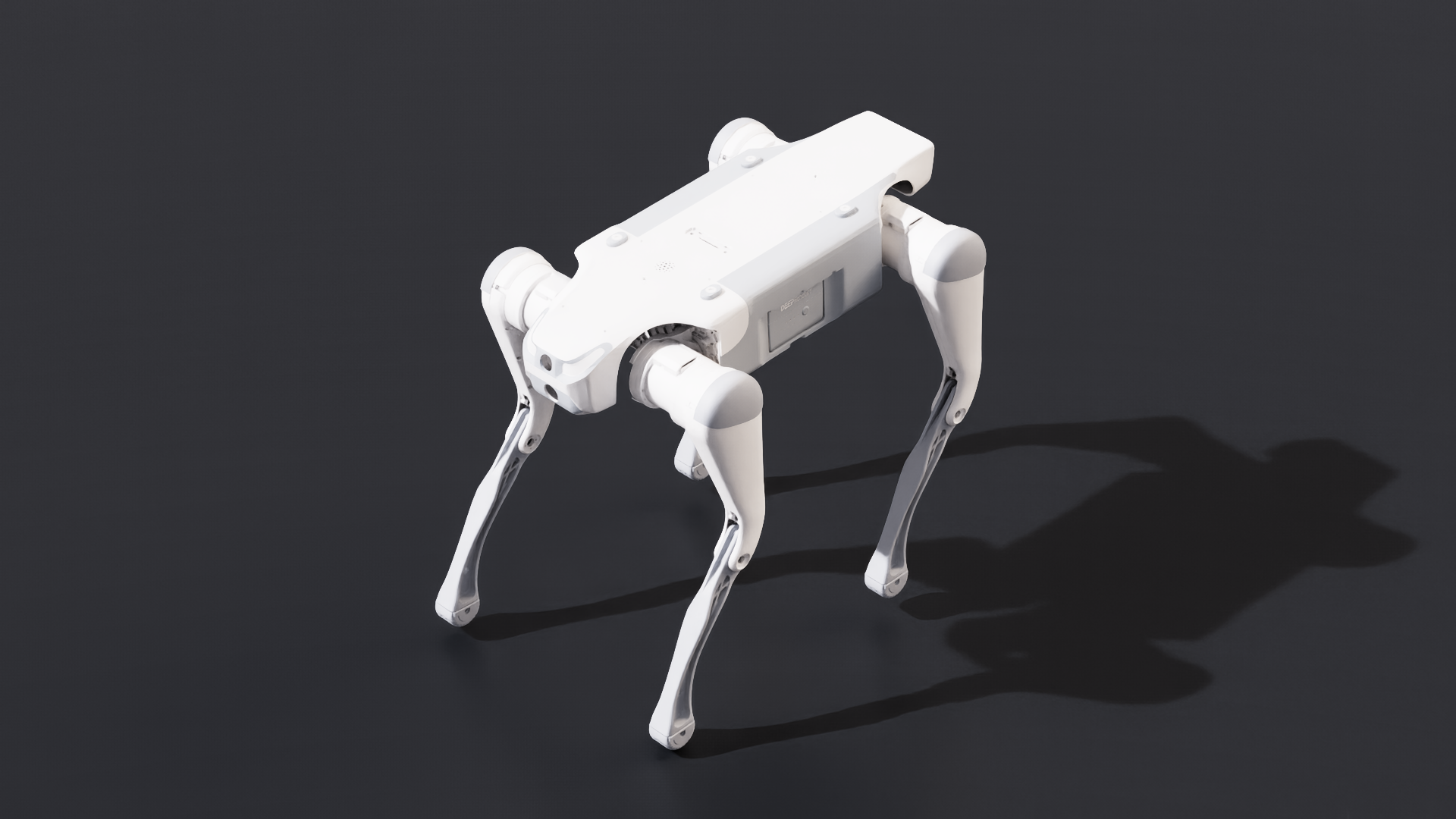
USD Path: BostonDynamics/spot/spot.usd#
Multiphysics USD Path: BostonDynamics/spot/spot.usda
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab
License: 3D Content Sharing Agreement

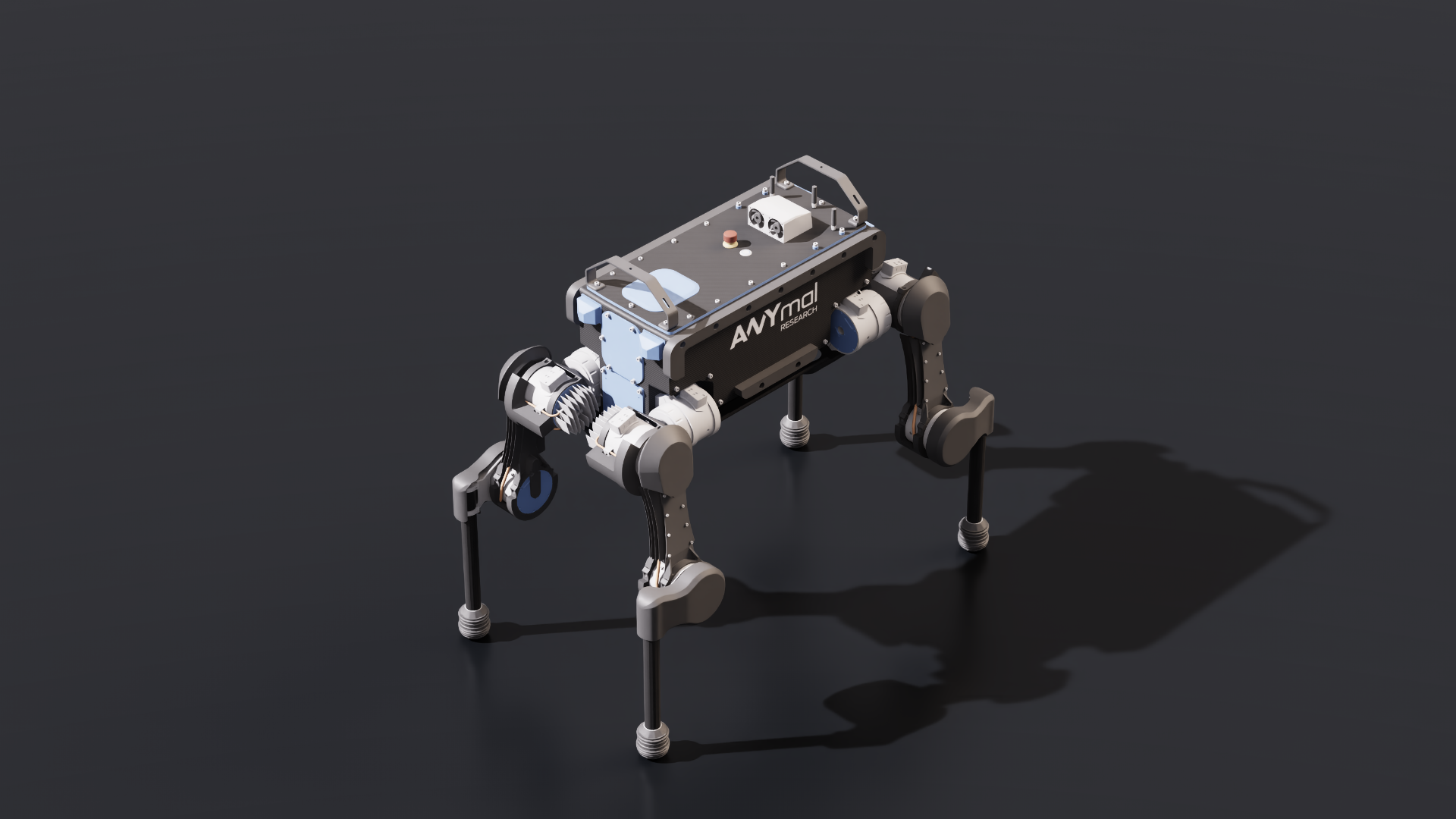
USD Path: ANYbotics/anymal_d/anymal_d.usd#
Multiphysics USD Path: ANYbotics/anymal_d/anymal_d.usda
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX JointAPI
PhysX ArticulationAPI
License: BSD-3

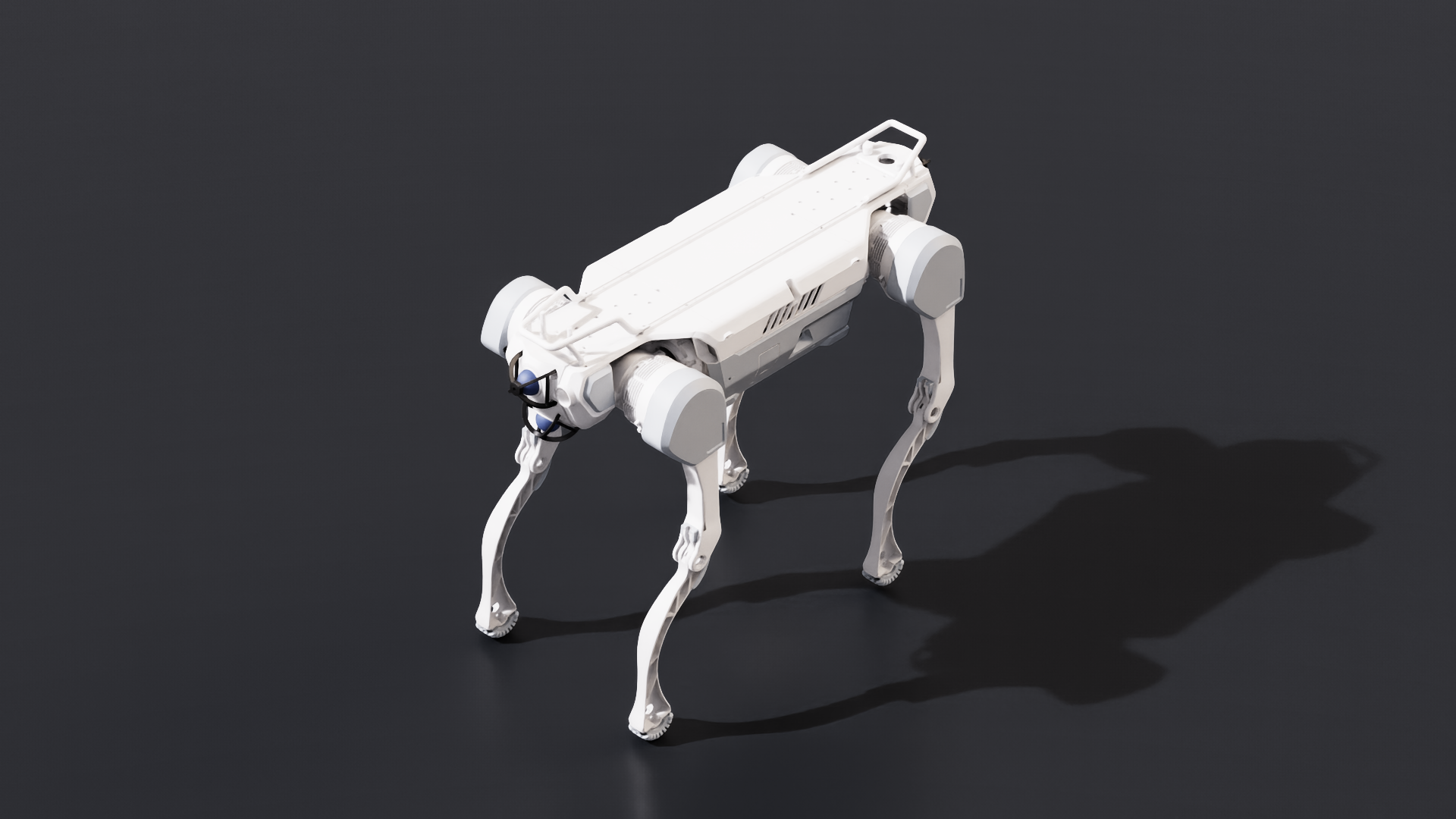
USD Path: DeepRobotics/X30/X30.usd#
Multiphysics USD Path: DeepRobotics/X30/X30.usda
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
License: BSD-3


USD Path: Addverb/Trakr/trakr.usd#
Multiphysics USD Path: Addverb/Trakr/trakr.usda ![]()
Properties
Number of Joints |
16 |
Number of Links |
17 |
Number of DOFs |
12 |
License: 3D Content Sharing Agreement

USD Path: NVIDIA/Kaya/kaya.usd#
Multiphysics USD Path: NVIDIA/Kaya/kaya.usda
Properties
Number of Joints |
33 |
Number of Links |
34 |
Number of DOFs |
33 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
License: NVIDIA

USD Path: NVIDIA/Kaya/kaya_ogn_gamepad.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX SceneAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI
License: NVIDIA

USD Path: Fraunhofer/O3dyn/o3dyn.usd#
Multiphysics USD Path: Fraunhofer/O3dyn/o3dyn.usda
Properties
Number of Joints |
76 |
Number of Links |
77 |
Number of DOFs |
64 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
License: 3D Content Sharing Agreement

USD Path: Fraunhofer/O3dyn/o3dyn_controller.usd#
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX RigidBodyAPI
PhysX CollisionAPI
PhysX JointAPI
PhysX ArticulationAPI
PhysX SceneAPI
License: 3D Content Sharing Agreement

USD Path: Fraunhofer/O3dyn/o3dyn_trimmed.usd#
Properties
Number of Joints |
52 |
Number of Links |
53 |
Number of DOFs |
40 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI
PhysX CollisionAPI
PhysX SceneAPI
License: 3D Content Sharing Agreement
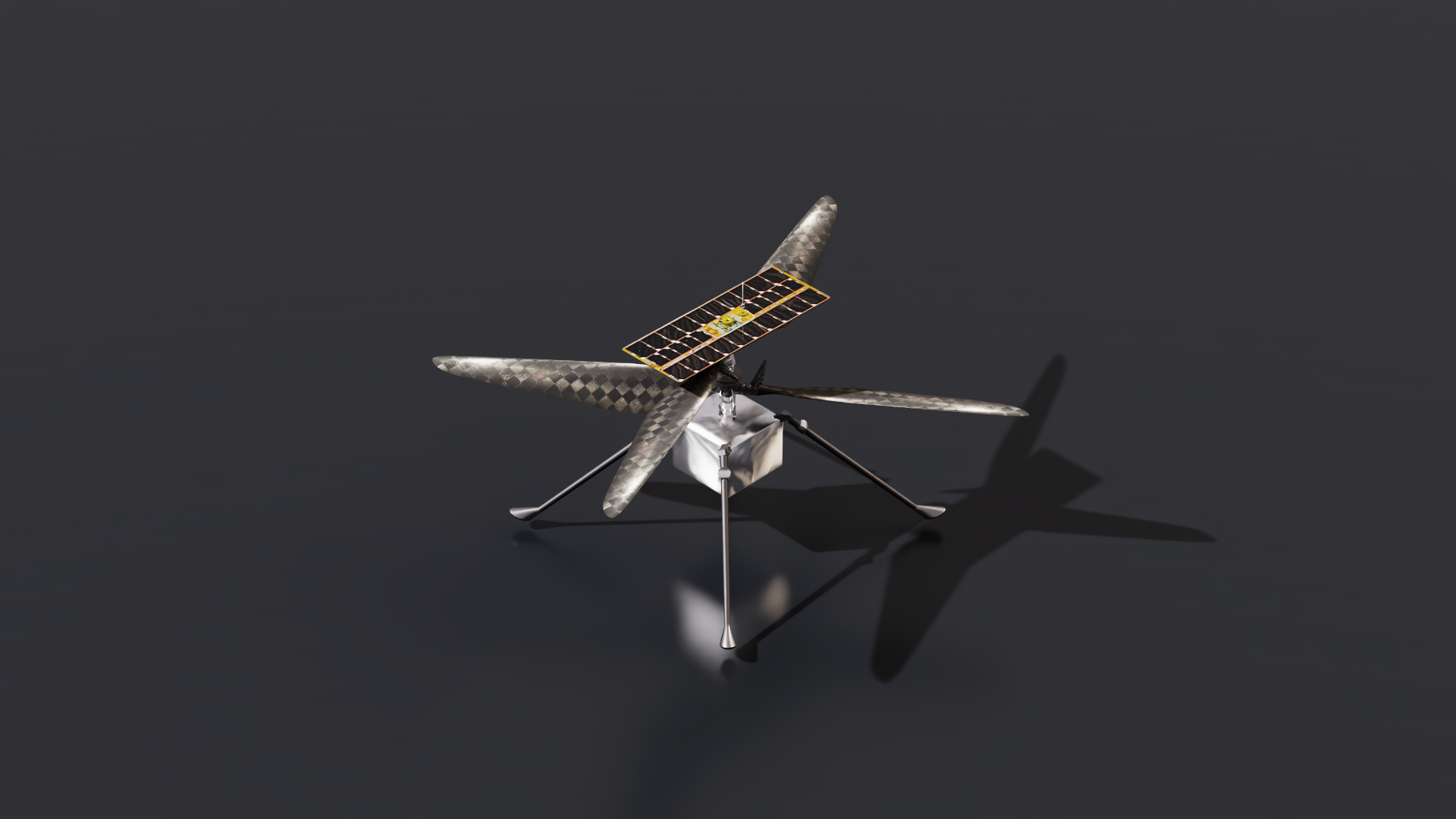
USD Path: NASA/Ingenuity/ingenuity.usd#
Multiphysics USD Path: NASA/Ingenuity/ingenuity.usda
Properties
Number of Joints |
4 |
Number of Links |
5 |
Number of DOFs |
4 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX CollisionAPI
License: NASA/JPL-Caltech 3D Model Download

USD Path: IsaacSim/Quadcopter/quadcopter.usd#
Multiphysics USD Path: IsaacSim/Quadcopter/quadcopter.usda
Properties
Number of Joints |
8 |
Number of Links |
9 |
Number of DOFs |
8 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI


USD Path: IsaacSim/Vehicle/basic_vehicle_m.usd#
Multiphysics USD Path: IsaacSim/Vehicle/basic_vehicle_m/basic_vehicle_m.usda
Properties
Number of Joints |
N/A |
Number of Links |
N/A |
Number of DOFs |
N/A |
Physics APIs:
PhysX RigidBodyAPI
PhysX CollisionAPI
PhysX SceneAPI
License: NVIDIA

USD Path: IsaacSim/SimpleArticulation/articulation_3_joints.usd#
Multiphysics USD Path: IsaacSim/SimpleArticulation/articulation_3_joints/articulation_3_joints.usda
Properties
Number of Joints |
3 |
Number of Links |
4 |
Number of DOFs |
3 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX CollisionAPI
USD Path: IsaacSim/SimpleArticulation/revolute_articulation.usd#
Properties
Number of Joints |
1 |
Number of Links |
2 |
Number of DOFs |
1 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX CollisionAPI
USD Path: IsaacSim/SimpleArticulation/simple_articulation.usd#
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX CollisionAPI

USD Path: IsaacSim/Humanoid28/humanoid_28.usd#
Multiphysics USD Path: IsaacSim/Humanoid28/humanoid_28/humanoid_28.usda
Properties
Number of Joints |
14 |
Number of Links |
15 |
Number of DOFs |
12 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI



USD Path: IsaacSim/DifferentialBase/differential_base.usd#
Multiphysics USD Path: IsaacSim/DifferentialBase/differential_base/differential_base.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX SceneAPI
PhysX JointAPI
USD Path: IsaacSim/Cartpole/cartpole.usd#
Multiphysics USD Path: IsaacSim/Cartpole/cartpole.usda
Properties
Number of Joints |
2 |
Number of Links |
3 |
Number of DOFs |
2 |
Physics APIs:
PhysX ArticulationAPI
PhysX JointAPI
USD Path: IsaacSim/CartDoublePendulum/cart_double_pendulum.usd#
Multiphysics USD Path: IsaacSim/CartDoublePendulum/cart_double_pendulum/cart_double_pendulum.usda
Properties
Number of Joints |
3 |
Number of Links |
4 |
Number of DOFs |
3 |
Physics APIs:
PhysX JointAPI
PhysX ArticulationAPI

USD Path: IsaacSim/BalanceBot/balance_bot.usd#
Multiphysics USD Path: IsaacSim/BalanceBot/balance_bot/balance_bot.usda
Properties
Number of Joints |
6 |
Number of Links |
7 |
Number of DOFs |
6 |
Physics APIs:
PhysX RigidBodyAPI
PhysX ArticulationAPI
PhysX JointAPI

USD Path: Clearpath/RidgebackUr/ridgeback_ur5.usd#
Multiphysics USD Path: Clearpath/RidgebackUr/ridgeback_ur5.usda
Properties
Number of Joints |
9 |
Number of Links |
10 |
Number of DOFs |
9 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: BSD-3

USD Path: Clearpath/RidgebackFranka/ridgeback_franka.usd#
Multiphysics USD Path: Clearpath/RidgebackFranka/ridgeback_franka.usda
Properties
Number of Joints |
18 |
Number of Links |
19 |
Number of DOFs |
12 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
This robot is in Isaac Lab
License: BSD-3

USD Path: BostonDynamics/spot/spot_with_arm.usd#
Properties
Number of Joints |
19 |
Number of Links |
20 |
Number of DOFs |
19 |
Physics APIs:
PhysX SceneAPI
PhysX ArticulationAPI
PhysX JointAPI
License: 3D Content Sharing Agreement

USD Path: Galbot/galbot/g1.usd#
Properties
Number of Joints |
86 |
Number of Links |
87 |
Number of DOFs |
77 |
Physics APIs:
PhysX ArticulationAPI
License: 3D Content Sharing Agreement