相机#
相机传感器通过使用 render_product 独特地定义,这是一个用于管理渲染流程(图像)生成的数据的结构。Isaac Lab 提供了完全控制这些渲染如何通过相机参数(如焦距、姿态、类型等)创建的能力,以及通过使用 Annotators,您可以控制希望渲染的数据类型,允许您记录不仅是 RGB 数据,还包括实例分割、物体姿态、物体 ID 等数据。
渲染的图像在 Isaac Lab 中是唯一的数据类型,因为这些数据的移动具有固有的较大带宽要求。单个 800 x 600 像素、32 位色彩(每个像素一个浮动点)的图像大小接近 2 MB。如果我们以每秒 60 帧的速度渲染并记录每一帧,那么该相机需要以 120 MB/s 的速度传输数据。将此值乘以环境中的相机数量和模拟中的环境数量,您可以快速看出,简单地向量化相机数据可能会导致带宽瓶颈。NVIDIA 的 Isaac Sim 利用我们在 GPU 硬件方面的专业知识,提供了一个专门解决渲染管线中这些扩展挑战的 API。
分块渲染#
备注
此功能仅适用于 Isaac Sim 版本 4.2.0 及更高版本。
分块渲染结合图像处理网络需要大量的内存资源,尤其是在更大分辨率下。我们建议在场景中使用 512 个相机,并配备 RTX 4090 GPU 或类似的硬件。
分块渲染 API 提供了一个向量化接口,用于从相机传感器收集数据。这对于强化学习环境非常有用,在这种环境中,可以利用并行化加速数据收集,从而加速训练循环。分块渲染通过使用一个单一的 render_product 来为场景中单个相机的 所有 克隆进行操作。单个图像的期望尺寸和环境的数量被用来计算一个更大的 render_product ,该产品由相机各个克隆的独立渲染组成。 当所有相机都填充完其缓冲区后,渲染产品便 “完成” ,可以作为一个单一的、大尺寸的图像进行移动,从而大幅减少将数据从主机传输到设备时的开销,例如。只使用一个调用来同步设备数据,而不是每个相机一个调用,这正是分块渲染 API 在处理视觉数据时更高效的一个重要原因。
Isaac Lab 提供了用于 RGB、深度和其他注释器的分块渲染 API,您可以通过 TiledCamera 类来使用这些 API。分块渲染 API 的配置可以通过 TiledCameraCfg 类定义,指定的参数包括所有相机路径的正则表达式、相机的变换、所需的数据类型、要添加到场景中的相机类型以及相机分辨率。
tiled_camera: TiledCameraCfg = TiledCameraCfg(
prim_path="/World/envs/env_.*/Camera",
offset=TiledCameraCfg.OffsetCfg(pos=(-7.0, 0.0, 3.0), rot=(0.9945, 0.0, 0.1045, 0.0), convention="world"),
data_types=["rgb"],
spawn=sim_utils.PinholeCameraCfg(
focal_length=24.0, focus_distance=400.0, horizontal_aperture=20.955, clipping_range=(0.1, 20.0)
),
width=80,
height=80,
)
要访问分块渲染接口,可以创建一个 TiledCamera 对象,并用其从相机获取数据。
tiled_camera = TiledCamera(cfg.tiled_camera)
data_type = "rgb"
data = tiled_camera.data.output[data_type]
返回的数据将被转换为形状 (num_cameras, height, width, num_channels),可以直接作为强化学习的观察值使用。
在进行渲染时,确保在启动环境时添加 --enable_cameras 参数。例如:
python scripts/reinforcement_learning/rl_games/train.py --task=Isaac-Cartpole-RGB-Camera-Direct-v0 --headless --enable_cameras
标注器#
两个 TiledCamera 和 Camera 类提供用于从 replicator 检索各种类型标注数据的 API:
"rgb": 一种三通道渲染的颜色图像。"rgba": 一个具有 alpha 通道的 4 通道渲染颜色图像。"distance_to_camera": 包含到相机光学中心的距离的图像。"distance_to_image_plane": 一个包含从摄像机平面沿摄像机 z 轴到 3D 点的距离的图像。"depth": 与"distance_to_image_plane"相同。"normals": 一个包含每个像素的局部表面法线向量的图像。"motion_vectors": 一个包含每个像素处运动矢量数据的图像。"semantic_segmentation": 语义分割数据。"instance_segmentation_fast": 实例分割数据。"instance_id_segmentation_fast": 实例 ID 分割数据。
RGB 和 RGBA#
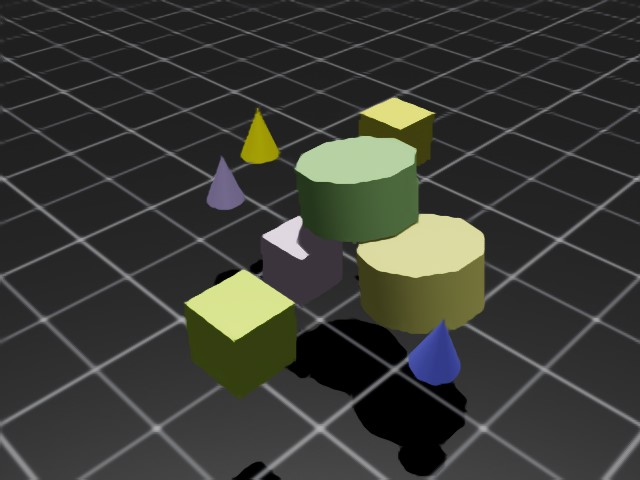
rgb 数据类型返回一个 3 通道 RGB 彩色图像,类型为 torch.uint8 ,维度为 (B, H, W, 3)。
rgba 数据类型返回一个 4 通道 RGBA 彩色图像,类型为 torch.uint8 ,维度为 (B, H, W, 4)。
将 torch.uint8 数据转换为 torch.float32 ,将缓冲区除以 255.0 以获得一个包含 0 到 1 之间数据的 torch.float32 缓冲区。
深度和距离#
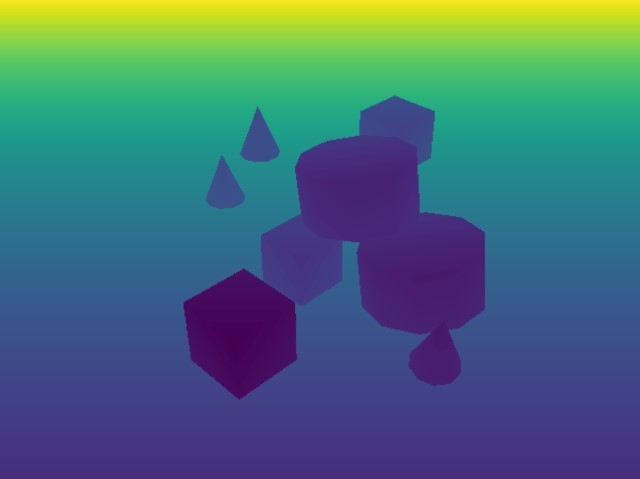
distance_to_camera 返回一个单通道深度图像,表示到相机光学中心的距离。此注释器的维度为 (B, H, W, 1),类型为 torch.float32 。
distance_to_image_plane 返回一个单通道深度图像,表示 3D 点相对于相机平面沿相机 Z 轴的距离。该注释器的维度为 (B, H, W, 1),类型为 torch.float32 。
depth 被作为 distance_to_image_plane 的别名,并将返回与 distance_to_image_plane 注释器相同的数据,维度为 (B, H, W, 1),类型为 torch.float32 。
法线#
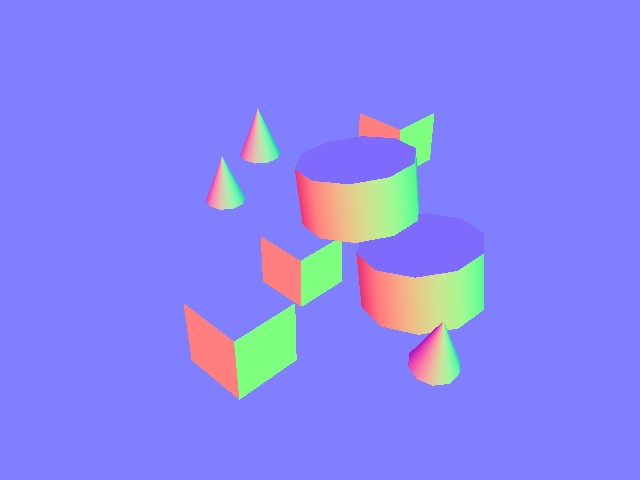
normals 返回一张包含每个像素局部表面法向量的图像。该缓冲区的维度为 (B, H, W, 3),包含每个向量的 (x, y, z) 信息,并且数据类型为 torch.float32 。
运动向量#
motion_vectors 返回图像空间中的每个像素的运动向量,使用 2D 数组表示每个像素在相机视口中在帧之间的相对运动。缓冲区的维度为 (B, H, W, 2),其中 x 表示水平方向(图像宽度)的运动距离,向左移动时为正,向右移动时为负;y 表示垂直方向(图像高度)的运动距离,向上移动时为正,向下移动时为负。数据类型为 torch.float32 。
语义分割#
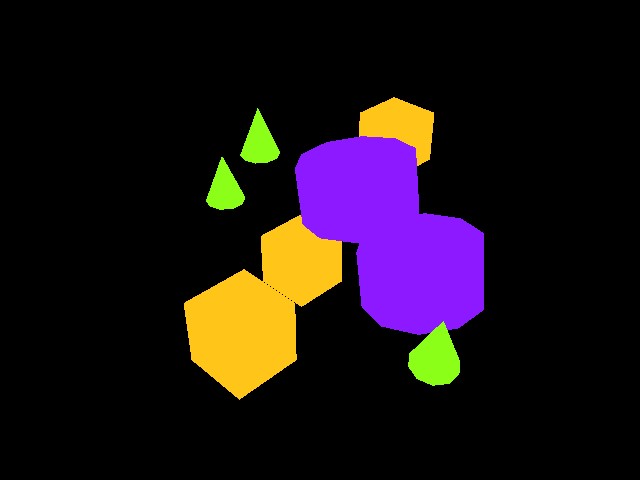
semantic_segmentation 输出相机视口中每个具有语义标签的实体的语义分割。除了图像缓冲区外,还可以通过 tiled_camera.data.info['semantic_segmentation'] 获取一个 info 字典,该字典包含 ID 到标签的信息。
如果
colorize_semantic_segmentation=True在相机配置中,返回的将是一个 4 通道的 RGBA 图像,维度为 (B, H, W, 4),类型为torch.uint8。信息idToLabels字典将是从颜色到语义标签的映射。如果
colorize_semantic_segmentation=False,则会返回一个维度为 (B, H, W, 1) 且类型为torch.int32的缓冲区,包含每个像素的语义 ID。信息idToLabels字典将是从语义 ID 到语义标签的映射。
实例 ID 分割#
instance_id_segmentation_fast 输出相机视口中每个实体的实例 ID 分割。每个场景中的 prim 拥有不同路径的唯一实例 ID。除了图像缓冲区外,还可以通过 tiled_camera.data.info['instance_id_segmentation_fast'] 检索到一个 info 字典,其中包含 ID 到标签的映射信息。
instance_id_segmentation_fast 和 instance_segmentation_fast 之间的主要区别在于,实例分割注释器会向下遍历层级,直到具有语义标签的最低级 prim,而实例 ID 分割则始终遍历到叶节点 prim。
如果
colorize_instance_id_segmentation=True在相机配置中,将返回一个 4 通道的 RGBA 图像,维度为 (B, H, W, 4),类型为torch.uint8。信息idToLabels字典将是颜色到该实体的 USD prim 路径的映射。如果
colorize_instance_id_segmentation=False,将返回一个形状为 (B, H, W, 1) 的类型为torch.int32的缓冲区,包含每个像素的实例 ID。信息idToLabels字典将是从实例 ID 到该实体的 USD prim 路径的映射。
实例分割#
instance_segmentation_fast 输出相机视口中每个实体的实例分割。除了图像缓冲区,还可以通过 tiled_camera.data.info['instance_segmentation_fast'] 获取 info 字典,其中包含 ID 到标签和 ID 到语义信息。
如果
colorize_instance_segmentation=True在相机配置中,则会返回一个 4 通道的 RGBA 图像,尺寸为 (B, H, W, 4),类型为torch.uint8。如果
colorize_instance_segmentation=False,则将返回一个维度为 (B, H, W, 1) 且类型为torch.int32的缓冲区,其中包含每个像素的实例 ID。
信息 idToLabels 字典将是从颜色到该语义实体的 USD prim 路径的映射。信息 idToSemantics 字典将是从颜色到该语义实体的语义标签的映射。
当前的限制#
出于性能考虑,我们默认使用 DLSS 进行去噪,这通常提供更好的性能。这可能导致渲染质量较低,尤其在较低分辨率下可能特别明显。因此,我们建议使用每图块或每相机分辨率至少为 100 x 100。对于较低分辨率的渲染,我们建议在 RenderCfg 中设置 antialiasing_mode 属性为 DLAA ,并可能启用 enable_dl_denoiser 。这两项设置应有助于提高渲染质量,但也会带来性能成本。还可以在 RenderCfg 中指定其他渲染参数。