[isaacsim.robot_setup.assembler] Robot Assembler#
Version: 3.0.8
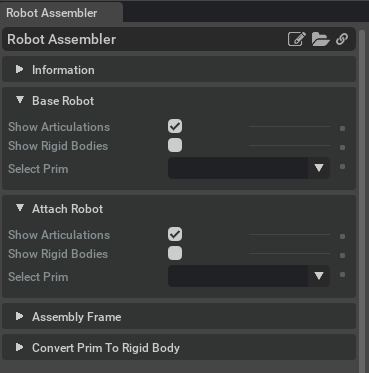
Alpha version of Robot Assembler Extension: Assemble multiple Articulations into a single robot
Enable Extension#
The extension can be enabled (if not already) in one of the following ways:
Define the next entry as an application argument from a terminal.
APP_SCRIPT.(sh|bat) --enable isaacsim.robot_setup.assembler
Define the next entry under [dependencies] in an experience (.kit) file or an extension configuration (extension.toml) file.
[dependencies]
"isaacsim.robot_setup.assembler" = {}
Open the Window > Extensions menu in a running application instance and search for isaacsim.robot_setup.assembler.
Then, toggle the enable control button if it is not already active.
API#
Python API#
RobotAssembler is a class to assemble robots from a base robot and an attachment robot. |
|
Class representing two assembled rigid bodies connected by a fixed joint. |
- class RobotAssembler#
Bases:
objectRobotAssembler is a class to assemble robots from a base robot and an attachment robot. It will create a new USD stage with the assembly and configure a variant selection to enable the attachment robot to be selected. If the variant set already exists in the source asset, it creates a new entry to it, otherwise it creates a new variant set.
- assemble()#
Composes the attachment robot onto the base robot, so that the attachment robot is a child of the base robot, and ready to simulate
- assemble_articulations(
- base_robot_path: str,
- attach_robot_path: str,
- base_robot_mount_frame: str,
- attach_robot_mount_frame: str,
- mask_all_collisions=True,
- single_robot=False,
- refresh_asset_paths: bool = False,
Compose two robots into one physical structure
- Parameters:
base_robot_path (str) – Path to base robot.
attach_robot_path (str) – Path to attach robot. The attach robot will be unrooted from the stage and attached only to the base robot
base_robot_mount_frame (str) – Relative path to frame in base robot where there is the desired attach point.
attach_robot_mount_frame (str) – Relative path to frame in the attach robot where there is the desired attach point.
mask_all_collisions (bool, optional) – Mask all collisions between attach robot and base robot. This is necessary when setting single_robot=False to prevent Physics constraint violations from the new fixed joint. Advanced users may set this flag to False and use the mask_collisions() function separately for more customizable behavior. Defaults to True.
single_robot (bool, optional) – If True: control the resulting composed robots as a single robot Articulation at base_robot_path. Setting this flag to True may resolve unstable physics behavior when teleporting the robot base. Defaults to False.
- Returns:
An object representing the assembled robot. This object can detach the composed robots and edit the fixed joint transform.
- Return type:
- assemble_rigid_bodies(
- base_path: str,
- attach_path: str,
- base_mount_frame: str,
- attach_mount_frame: str,
- mask_all_collisions: bool = True,
- refresh_asset_paths: bool = False,
Assemble two rigid bodies into one physical structure
- Parameters:
base_robot_path (str) – Path to base robot.
attach_robot_path (str) – Path to attach robot. The attach robot will be unrooted from the stage and attached only to the base robot
base_robot_mount_frame (str) – Relative path to frame in base robot where there is the desired attach point.
attach_robot_mount_frame (str) – Relative path to frame in the attach robot where there is the desired attach point.
mask_all_collisions (bool, optional) – Mask all collisions between attach robot and base robot. This is necessary when setting single_robot=False to prevent Physics constraint violations from the new fixed joint. Advanced users may set this flag to False and use the mask_collisions() function separately for more customizable behavior. Defaults to True.
- Returns:
An object representing the assembled bodies. This object can detach the composed robots and edit the fixed joint transform.
- Return type:
- begin_assembly(
- stage,
- base_prim_path,
- base_mount_path,
- attachment_prim_path,
- attachment_mount_path,
- variant_set,
- variant_name,
Start the robot assembly process.
Places the attachment robot relative to the base robot but does not compose them yet.
- Parameters:
stage (Usd.Stage) – USD stage for assembly
base_prim_path (str) – Path to base robot prim
base_mount_path (str) – Path to mount frame on base robot
attachment_prim_path (str) – Path to attachment robot prim
attachment_mount_path (str) – Path to mount frame on attachment robot
variant_set (str) – Name of variant set to create/modify
variant_name (str) – Name of variant to create
- cancel_assembly()#
Cancel the current assembly operation and reset state.
- convert_prim_to_rigid_body(prim_path: str) None#
Convert a prim to a rigid body by applying the UsdPhysics.RigidBodyAPI Also sets physics:kinematicEnabled property to true to prevent falling from gravity without needing a fixed joint.
- Parameters:
prim_path (str) – Path to prim to convert.
- create_fixed_joint(
- prim_path: str,
- target0: str = None,
- target1: str = None,
Create a fixed joint between two bodies
- Parameters:
prim_path (str) – Prim path at which to place new fixed joint.
target0 (str, optional) – Prim path of frame at which to attach fixed joint. Defaults to None.
target1 (str, optional) – Prim path of frame at which to attach fixed joint. Defaults to None.
- Returns:
A USD fixed joint
- Return type:
UsdPhysics.FixedJoint
- finish_assemble()#
- is_root_joint(prim) bool#
Check if a prim is a root joint (has no body0 or body1 target).
- Parameters:
prim (Usd.Prim) – Prim to check
- Returns:
True if prim is a root joint, False otherwise
- Return type:
bool
- mask_collisions(
- prim_path_a: str,
- prim_path_b: str,
Mask collisions between two prims. All nested prims will also be included.
- Parameters:
prim_path_a (str) – Path to a prim
prim_path_b (str) – Path to a prim
- Returns:
A relationship filtering collisions between prim_path_a and prim_path_b
- Return type:
Usd.Relationship
- reset()#
- class AssembledRobot(
- assembled_robots: AssembledBodies,
Bases:
object- get_fixed_joint_transform()#
Get the transform between mount frames in composed robot.
- Returns:
translation with shape (3,) and orientation with shape (4,)
- Return type:
Tuple[np.array, np.array]
- set_fixed_joint_transform(
- translation: array,
- orientation: array,
Set the transform between mount frames in the composed robot.
- Parameters:
translation (np.array) – Local translation relative to mount frame on base robot.
orientation (np.array) – Local quaternion orientation relative to mount frame on base robot.
- property attach_path: str#
Prim path of the floating (attach) body
- Returns:
Prim path of the floating (attach) body
- Return type:
str
- property base_path: str#
Prim path of the base body
- Returns:
Prim path of the base body
- Return type:
str
- property collision_mask: pxr.Usd.Relationship#
A Usd Relationship masking collisions between the two assembled robots
- Returns:
A Usd Relationship masking collisions between the two assembled robots
- Return type:
Usd.Relationship
- property fixed_joint: pxr.UsdPhysics.FixedJoint#
USD fixed joint linking base and floating body together
- Returns:
USD fixed joint linking base and floating body together
- Return type:
UsdPhysics.FixedJoint
- property root_joints: List[pxr.UsdPhysics.Joint]#
Root joints that tie the floating body to the USD stage. These are disabled in an assembled body, and will be re-enabled by the disassemble() function.
- Returns:
Root joints that tie the floating body to the USD stage.
- Return type:
List[UsdPhysics.Joint]
- class AssembledBodies(
- base_path: str,
- attach_path: str,
- fixed_joint: pxr.UsdPhysics.FixedJoint,
- root_joints: List[pxr.UsdPhysics.Joint],
- attach_body_articulation_root: pxr.Usd.Prim,
- collision_mask=None,
Bases:
objectClass representing two assembled rigid bodies connected by a fixed joint.
This class maintains references to the base and attach bodies, the fixed joint connecting them, and provides methods to manipulate their relative transform.
- get_fixed_joint_transform() Tuple[array, array]#
Get the transform between mount frames in composed robot.
- Returns:
translation with shape (3,) and orientation with shape (4,)
- Return type:
Tuple[np.array, np.array]
- set_fixed_joint_transform(
- translation: array,
- orientation: array,
Set the transform between mount frames in the composed body.
- Parameters:
translation (np.array) – Local translation relative to mount frame on base body.
orientation (np.array) – Local quaternion orientation relative to mount frame on base body.
- property attach_body_articulation_root: pxr.Usd.Prim#
USD articulation root of the floating body
- Returns:
USD articulation root of the floating body
- Return type:
Usd.Prim
- property attach_path: str#
Prim path of the floating (attach) body
- Returns:
Prim path of the floating (attach) body
- Return type:
str
- property base_path: str#
Prim path of the base body
- Returns:
Prim path of the base body
- Return type:
str
- property collision_mask: pxr.Usd.Relationship#
A Usd Relationship masking collisions between the two assembled bodies
- Returns:
A Usd Relationship masking collisions between the two assembled bodies
- Return type:
Usd.Relationship
- property fixed_joint: pxr.UsdPhysics.FixedJoint#
USD fixed joint linking base and floating body together
- Returns:
USD fixed joint linking base and floating body together
- Return type:
UsdPhysics.FixedJoint
- property root_joints: List[pxr.UsdPhysics.Joint]#
Root joints that tie the floating body to the USD stage. These are disabled in an assembled body, and will be re-enabled by the disassemble() function.
- Returns:
Root joints that tie the floating body to the USD stage.
- Return type:
List[UsdPhysics.Joint]
Actions in isaacsim.robot_setup.assembler#
ID |
Display Name |
Description |
|---|---|---|
CreateUIExtension:Robot Assembler |
Add Robot Assembler Extension to UI toolbar |