[isaacsim.robot.surface_gripper.ui] Isaac Sim Surface Gripper UI Components#
Version: 3.0.2
UI components for the Surface Gripper extension
Enable Extension#
The extension can be enabled (if not already) in one of the following ways:
Define the next entry as an application argument from a terminal.
APP_SCRIPT.(sh|bat) --enable isaacsim.robot.surface_gripper.ui
Define the next entry under [dependencies] in an experience (.kit) file or an extension configuration (extension.toml) file.
[dependencies]
"isaacsim.robot.surface_gripper.ui" = {}
Open the Window > Extensions menu in a running application instance and search for isaacsim.robot.surface_gripper.ui.
Then, toggle the enable control button if it is not already active.
Actions in isaacsim.robot.surface_gripper.ui#
ID |
Display Name |
Description |
|---|---|---|
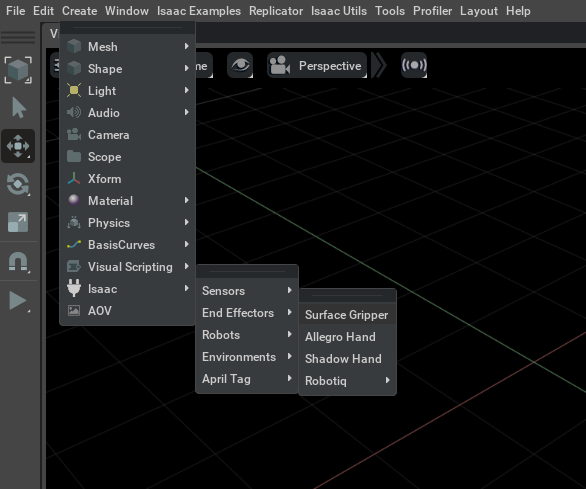
isaac_create_surface_gripper |
Create Surface Gripper |
Create a physics based gripper for simulating suction/surface type grippers |