[isaacsim.asset.gen.omap] Isaac Sim Occupancy Map#
Version: 2.0.28
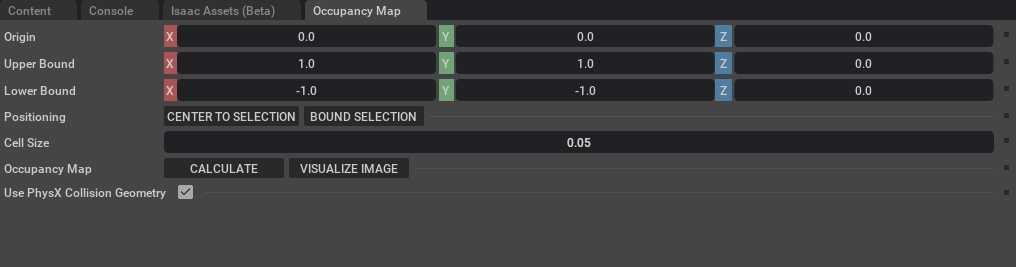
The Isaac Sim Occupancy Map extension provides tools to generate occupancy maps for a Scene
Enable Extension#
The extension can be enabled (if not already) in one of the following ways:
Define the next entry as an application argument from a terminal.
APP_SCRIPT.(sh|bat) --enable isaacsim.asset.gen.omap
Define the next entry under [dependencies] in an experience (.kit) file or an extension configuration (extension.toml) file.
[dependencies]
"isaacsim.asset.gen.omap" = {}
Open the Window > Extensions menu in a running application instance and search for isaacsim.asset.gen.omap.
Then, toggle the enable control button if it is not already active.
API#
Python API#
Generator for creating occupancy maps from USD stages. |
- class Generator#
Bases:
pybind11_objectGenerator for creating occupancy maps from USD stages.
This class is used to generate an occupancy map for a USD stage. Assuming the stage has collision geometry information, it can produce 2D or 3D representations of the environment’s occupied and free space.
- None#
Example
>>> import omni >>> from isaacsim.asset.gen.omap.bindings import _omap >>> >>> physx = omni.physx.get_physx_interface() >>> stage_id = omni.usd.get_context().get_stage_id() >>> >>> generator = _omap.Generator(physx, stage_id) >>> # 0.05m cell size, output buffer will have 4 for occupied cells, >>> # 5 for unoccupied, and 6 for cells that cannot be seen >>> # this assumes your usd stage units are in m, and not cm >>> generator.update_settings(.05, 4, 5, 6) >>> # Set location to map from and the min and max bounds to map to >>> generator.set_transform((0, 0, 0), (-2, -2, 0), (2, 2, 0)) >>> generator.generate2d() >>> # Get locations of the occupied cells in the stage >>> points = generator.get_occupied_positions() >>> # Get computed 2d occupancy buffer >>> buffer = generator.get_buffer() >>> # Get dimensions for 2d buffer >>> dims = generator.get_dimensions()
- __init__(
- self: isaacsim.asset.gen.omap.bindings._omap.Generator,
- arg0: omni::physx::IPhysx,
- arg1: int,
Initialize a new Generator instance.
- Parameters:
physx_ptr – Pointer to PhysX interface used for collision detection.
stage_id – Stage ID for the USD stage to map.
- Returns:
A new Generator instance.
- generate2d( ) None#
Generate a 2D occupancy map.
Generates a map based on the settings and transform set. Assumes that a 2D map is generated and flattens the computed data.
- Parameters:
None
- Returns:
None
- generate3d( ) None#
Generate a 3D occupancy map.
Generates a map based on the settings and transform set. Creates a full 3D volumetric representation of the scene’s occupancy.
- Parameters:
None
- Returns:
None
- get_buffer( ) List[float]#
Get the raw occupancy buffer.
- Returns:
- 2D array containing values for each cell in the occupancy map.
Values correspond to the occupancy state of each cell (occupied, unoccupied, or unknown) as configured in update_settings().
- Return type:
list
- get_colored_byte_buffer(
- self: isaacsim.asset.gen.omap.bindings._omap.Generator,
- arg0: carb::Int4,
- arg1: carb::Int4,
- arg2: carb::Int4,
Generate a colored visualization buffer.
Creates an RGBA buffer for visualization purposes, where each cell is colored according to its occupancy state.
- Parameters:
occupied_color (tuple) – RGBA Value used to denote an occupied cell.
unoccupied_color (tuple) – RGBA Value used to denote an unoccupied cell.
unknown_color (tuple) – RGBA Value used to denote unknown areas that could not be reached.
- Returns:
- Flattened buffer containing list of RGBA values for each pixel.
Can be used to render as image directly.
- Return type:
list
- get_dimensions( ) carb::Int3#
Get the dimensions of the map in cell units.
- Returns:
Dimensions for output buffer (width, height, depth).
- Return type:
tuple
- get_free_positions( ) List[carb::Float3]#
Get positions of all free (unoccupied) cells.
- Returns:
- List of 3D points in stage coordinates from the generated map,
containing free locations.
- Return type:
list
- get_max_bound( ) carb::Float3#
Get the maximum boundary point of the map.
- Returns:
Maximum bound for generated occupancy map in stage coordinates.
- Return type:
tuple
- get_min_bound( ) carb::Float3#
Get the minimum boundary point of the map.
- Returns:
Minimum bound for generated occupancy map in stage coordinates.
- Return type:
tuple
- get_occupied_positions( ) List[carb::Float3]#
Get positions of all occupied cells.
- Returns:
- List of 3D points in stage coordinates from the generated map,
containing occupied locations.
- Return type:
list
- set_transform(
- self: isaacsim.asset.gen.omap.bindings._omap.Generator,
- arg0: carb::Float3,
- arg1: carb::Float3,
- arg2: carb::Float3,
Set origin and bounds for mapping.
- Parameters:
origin (tuple of float) – Origin in stage to start mapping from, must be in unoccupied space.
min_bound (tuple of float) – Minimum bound to map up to.
max_bound (tuple of float) – Maximum bound to map up to.
- Returns:
None
- update_settings(
- self: isaacsim.asset.gen.omap.bindings._omap.Generator,
- arg0: float,
- arg1: float,
- arg2: float,
- arg3: float,
Update the settings used for generating the occupancy map.
- Parameters:
cell_size (float) – Size of the cell in stage units, resolution of the grid.
occupied_value (float) – Value used to denote an occupied cell.
unoccupied_value (float) – Value used to denote an unoccupied cell.
unknown_value (float) – Value used to denote unknown areas that could not be reached from the starting location.
- Returns:
None