[isaacsim.asset.importer.mjcf] Omniverse MJCF Importer#
Version: 2.5.8
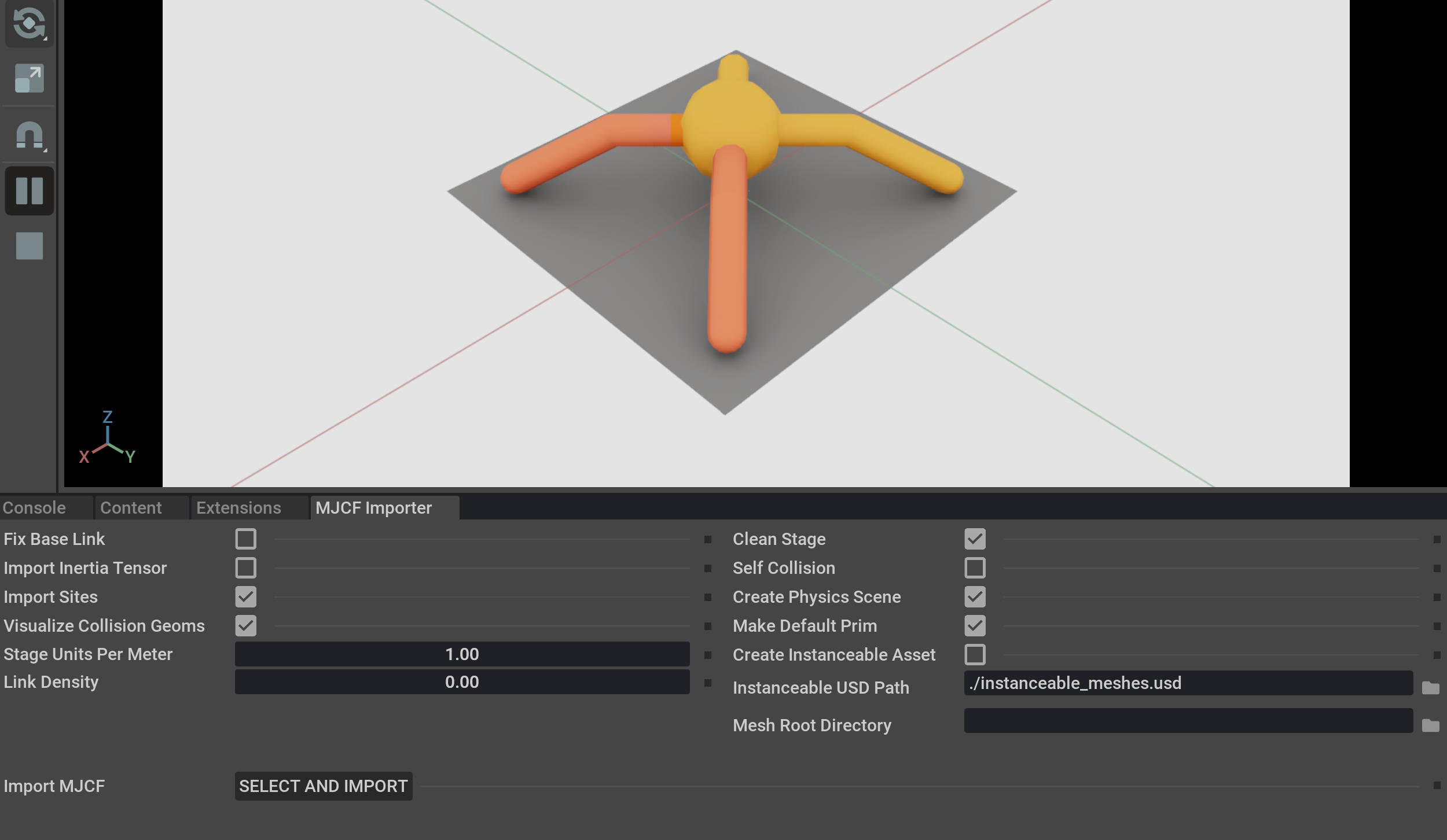
MJCF Importer
Enable Extension#
The extension can be enabled (if not already) in one of the following ways:
Define the next entry as an application argument from a terminal.
APP_SCRIPT.(sh|bat) --enable isaacsim.asset.importer.mjcf
Define the next entry under [dependencies] in an experience (.kit) file or an extension configuration (extension.toml) file.
[dependencies]
"isaacsim.asset.importer.mjcf" = {}
Open the Window > Extensions menu in a running application instance and search for isaacsim.asset.importer.mjcf.
Then, toggle the enable control button if it is not already active.
MJCF Importer Extension [isaacsim.asset.importer.mjcf]#
MJCF Import Commands#
The following commands can be used to simplify the import process. Below is a sample demonstrating how to import the Ant MJCF included with this extension
1import omni.kit.commands
2from pxr import UsdLux, Sdf, Gf, UsdPhysics, PhysicsSchemaTools
3
4# setting up import configuration:
5status, import_config = omni.kit.commands.execute("MJCFCreateImportConfig")
6import_config.set_fix_base(True)
7import_config.set_import_inertia_tensor(True)
8
9# Get path to extension data:
10ext_manager = omni.kit.app.get_app().get_extension_manager()
11ext_id = ext_manager.get_enabled_extension_id("isaacsim.asset.importer.mjcf")
12extension_path = ext_manager.get_extension_path(ext_id)
13
14# import MJCF
15omni.kit.commands.execute(
16 "MJCFCreateAsset",
17 mjcf_path=extension_path + "/data/mjcf/nv_ant.xml",
18 import_config=import_config,
19 prim_path="/ant"
20)
21
22# get stage handle
23stage = omni.usd.get_context().get_stage()
24
25# enable physics
26scene = UsdPhysics.Scene.Define(stage, Sdf.Path("/physicsScene"))
27# set gravity
28scene.CreateGravityDirectionAttr().Set(Gf.Vec3f(0.0, 0.0, -1.0))
29scene.CreateGravityMagnitudeAttr().Set(9.81)
30
31# add lighting
32distantLight = UsdLux.DistantLight.Define(stage, Sdf.Path("/DistantLight"))
33distantLight.CreateIntensityAttr(500)
- class MJCFCreateAsset(*args: Any, **kwargs: Any)#
This command parses and imports a given mjcf file.
- Parameters:
arg0 (
str) – The absolute path the mjcf filearg1 (
isaacsim.asset.importer.mjcf._mjcf.ImportConfig) – Import configurationarg2 (
str) – Path to the robot on the USD stagearg3 (
str) – destination path for robot usd. Default is “” which will load the robot in-memory on the open stage.
- class MJCFCreateImportConfig(*args: Any, **kwargs: Any)#
Returns an ImportConfig object that can be used while parsing and importing. Should be used with the MJCFCreateAsset command
- Returns:
Parsed MJCF stored in an internal structure.
- Return type:
This extension provides an interface to the MJCF importer.
Example
Setup the configuration parameters before importing. Files must be parsed before imported.
>>> import omni
>>> import os
>>> from isaacsim.asset.importer.mjcf import _mjcf
>>> mjcf_interface = _mjcf.acquire_mjcf_interface()
>>>
>>> # setup config params
>>> import_config = _mjcf.ImportConfig()
>>> import_config.fix_base = True
>>>
>>> # parse and import file
>>> ext_manager = omni.kit.app.get_app().get_extension_manager()
>>> ext_id = ext_manager.get_enabled_extension_id("isaacsim.asset.importer.mjcf")
>>> extension_path = ext_manager.get_extension_path(ext_id)
>>> mjcf_path = os.path.abspath(extension_path + "/data/mjcf/nv_ant.xml")
>>> mjcf_interface.create_asset_mjcf(mjcf_path, "", import_config)
Refer to the sample documentation for more examples and usage
- class Mjcf#
- create_asset_mjcf(
- self: isaacsim.asset.importer.mjcf._mjcf.Mjcf,
- fileName: str,
- primName: str,
- config: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- stage_identifier: str = '',
Parse and import MJCF file.
- Parameters:
arg0 (
str) – The absolute path to the mjcfarg1 (
str) – Path to the robot on the USD stagearg2 (
isaacsim.asset.importer.mjcf._mjcf.ImportConfig) – Import configurationarg3 (
str) – optional: path to stage to use for importing. leaving it empty will import on open stage. If the open stage is a new stage, textures will not load.
- class ImportConfig#
- set_convex_decomp(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_create_body_for_fixed_joint(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_create_physics_scene(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_default_drive_strength(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: float,
- set_density(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: float,
- set_distance_scale(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: float,
- set_fix_base(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_import_inertia_tensor(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_import_sites(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_instanceable_usd_path(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: str,
- set_make_default_prim(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_make_instanceable(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_merge_fixed_joints(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_override_com(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_override_inertia(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_self_collision(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- set_visualize_collision_geoms(
- self: isaacsim.asset.importer.mjcf._mjcf.ImportConfig,
- arg0: bool,
- property convex_decomp#
Decompose a convex mesh into smaller pieces for a closer fit
- property create_body_for_fixed_joint#
creates body for fixed joint
- property create_physics_scene#
add a physics scene to the stage on import
- property default_drive_strength#
default drive stiffness used for joints
- property density#
default density used for links
- property distance_scale#
Set the unit scaling factor, 1.0 means meters, 100.0 means cm
- property fix_base#
Create fix joint for base link
- property import_inertia_tensor#
Import inertia tensor from mjcf, if not specified in mjcf it will import as identity
- property instanceable_usd_path#
USD file to store instanceable mehses in
- property make_default_prim#
set imported robot as default prim
- property make_instanceable#
Creates an instanceable version of the asset. All meshes will be placed in a separate USD file
- property merge_fixed_joints#
Consolidating links that are connected by fixed joints
- property override_com#
whether to compute the center of mass from geometry and override values given in the original asset
- property override_inertia_tensor#
Whether to compute the inertia tensor from geometry and override values given in the original asset
- property self_collision#
Self collisions between links in the articulation