Depth Sensors#
Stereoscopic Depth Cameras#
Single-View Post-Processing Pipeline#
Isaac Sim models stereoscopic depth cameras using a single camera view via the isaacsim.sensors.camera.SingleViewDepthSensor class. This class wraps around isaacsim.sensors.camera.Camera, and
includes APIs for configuring a post-processing pipeline for stereoscopic depth estimation from a single Camera prim. The process by which the renderer models disparity and noise from a single camera view
is described in detail here.
Standalone Python#
Check out the standalone example located at standalone_examples/api/isaacsim.sensors.camera/camera_stereoscopic_depth.py for an example of how to use the isaacsim.sensors.camera.SingleViewDepthSensor class
and the new Annotators provided in Replicator.
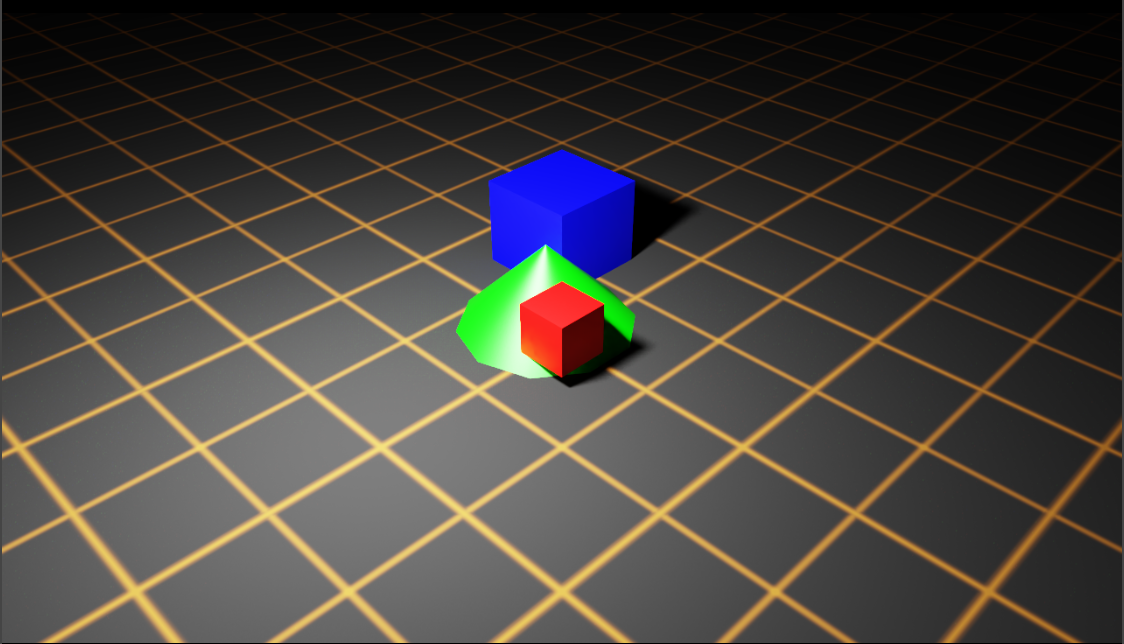
When running the standalone example, you will see a simple set of colored shapes in the Black Grid environment in the viewport, like below:
Now, examine the disparity map generated by the depth sensor as follows:
Select the camera render product in the viewport.
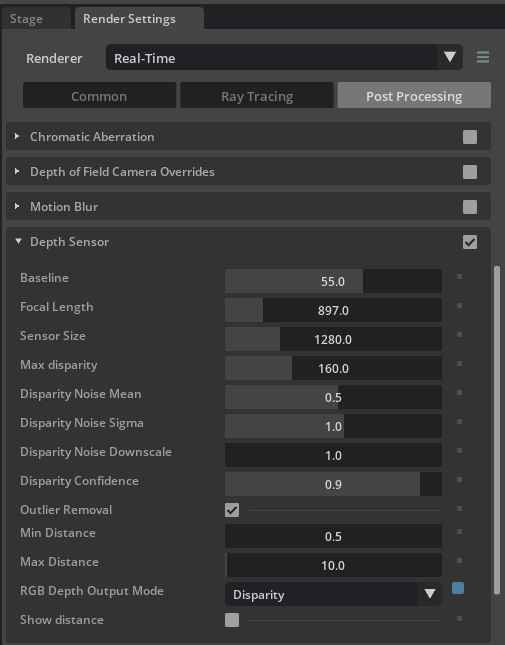
Click Render Settings > Post Processing > Depth Sensor to examine the depth sensor post-processing pipeline settings.
Tick the checkbox for Depth Sensor.
Select Disparity from the RGB Depth Output Mode dropdown.
The settings will look like the following:
Note
To learn more about these Post Processing settings, please visit our Single View Depth Camera documentation.
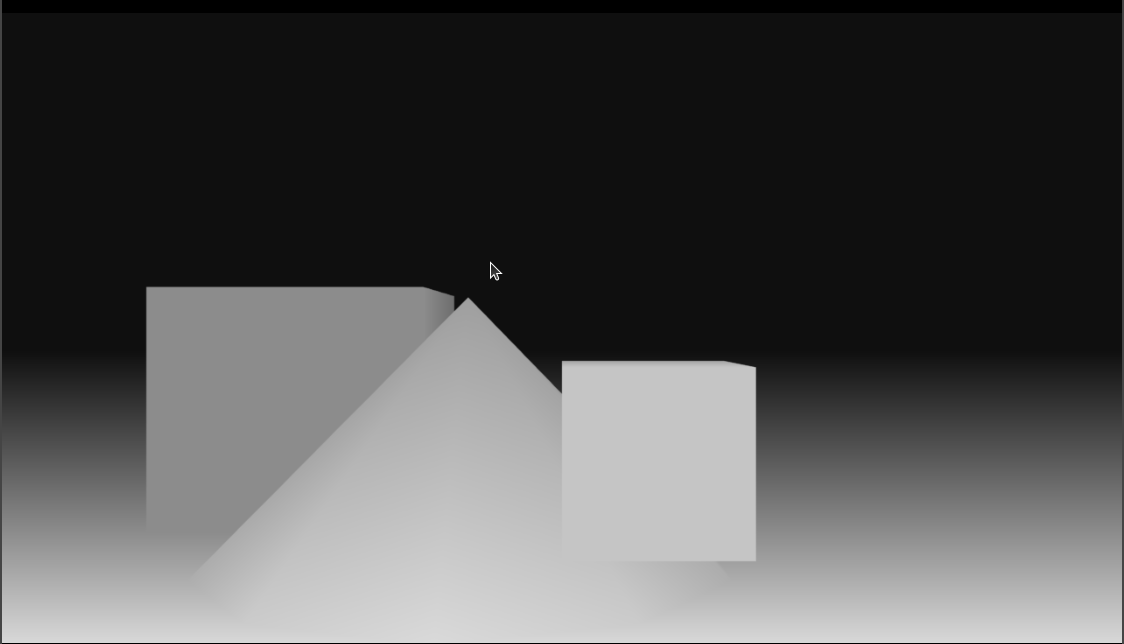
You should now see the disparity map in the viewport, like below:
Note
Any settings under Render Settings > Post Processing > Depth Sensor will be applied to all render products in the scene (including the viewport). The isaacsim.sensors.camera.SingleViewDepthSensor class
enables configuration of individual render products as depth sensors.
Close the Isaac Sim UI and rerun the standalone example as follows:
./python.sh standalone_examples/api/isaacsim.sensors.camera/camera_stereoscopic_depth.py --test
Isaac Sim will now run the standalone example in headless mode, and generate the following output from Annotators
attached to the camera render product. The first image is output from the DepthSensorDistance Annotator (depth_sensor_distance.png), and the
second image is output from the DistanceToImagePlane Annotator (distance_to_image_plane.png).

Warning
When using any of the new depth AOVs, you may see the following (or similar) errors:
[Error] [rtx.postprocessing.plugin] DepthSensor: Texture sizes do not match: inColorTexDesc 1920x1080x1:11@0 inDepthTexDesc 1500x843x1:33@0
[Error] [rtx.postprocessing.plugin] DepthSensor: Failed to allocate view resources for view 1 device 0
[Error] [carb.scenerenderer-rtx.plugin] Failed to export AOV 38 to render product. The renderer did not generate the AOV texture
These errors are expected for the first frame of the depth simulation and will be corrected in a future release.
Depth Camera Asset Wrapper#
Isaac Sim supports several official Depth Sensors. These can be automatically loaded as references on a stage
via the isaacsim.sensors.camera.SingleViewDepthSensorAsset class. This API will search the asset for RenderProduct``prims specifying single-view depth
sensor characteristics, tailored for a specific camera in the asset, then wrap those ``Camera prims as SingleViewDepthSensor instances. By loading the
asset in this manner, you will have full control over the post-processing pipeline for each depth sensor in the asset, and can attach any number of Annotators
to the SingleViewDepthSensor instances via its API.
Note
Attribute specification for Camera prims in the official assets linked above are tentative, and may change in future asset updates or releases.
Script Editor#
As an example, you can load the Intel Realsense D455 depth camera asset and attach an Annotator to the depth sensor by running the following snippet in the Script Editor:
from isaacsim.sensors.camera import SingleViewDepthSensorAsset
from isaacsim.storage.native import get_assets_root_path
# Add Realsense D455 to the stage
asset_path = get_assets_root_path() + "/Isaac/Sensors/Intel/RealSense/rsd455.usd"
realsense_d455 = SingleViewDepthSensorAsset(prim_path="/World/realsense_d455", asset_path=asset_path)
# Initialize all depth sensor prims in the asset, creating render products
# attached to HydraTextures for each.
realsense_d455.initialize()
# Print prim paths for all available depth sensors in the asset
print(realsense_d455.get_all_depth_sensor_paths())
# Get a specific depth sensor by camera prim path
depth_sensor = realsense_d455.get_child_depth_sensor("/World/realsense_d455/RSD455/Camera_Pseudo_Depth")
# Attach an Annotator to the depth sensor
depth_sensor.attach_annotator("DepthSensorDistance")
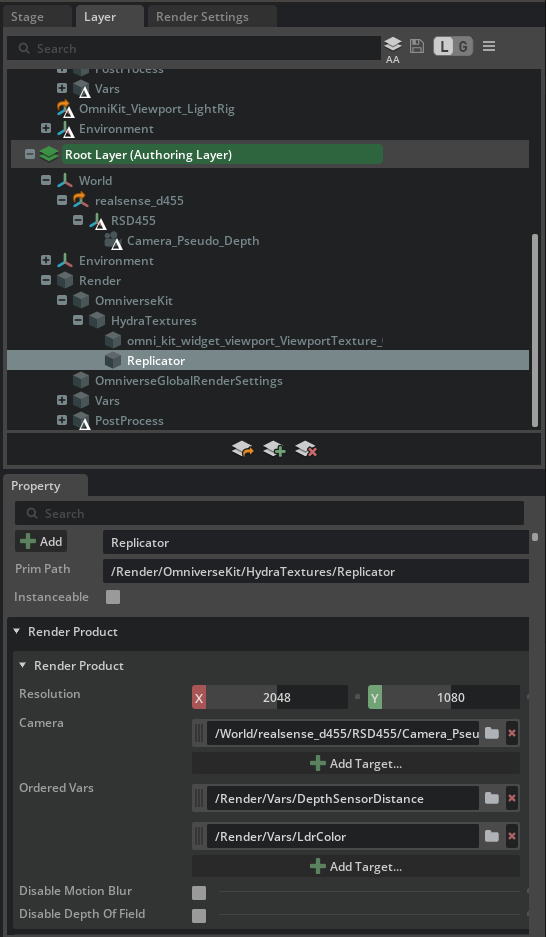
Observe the Stage window indicates the Realsense D455 depth camera asset has been loaded.
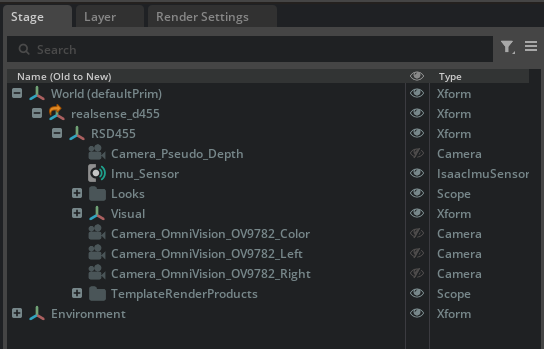
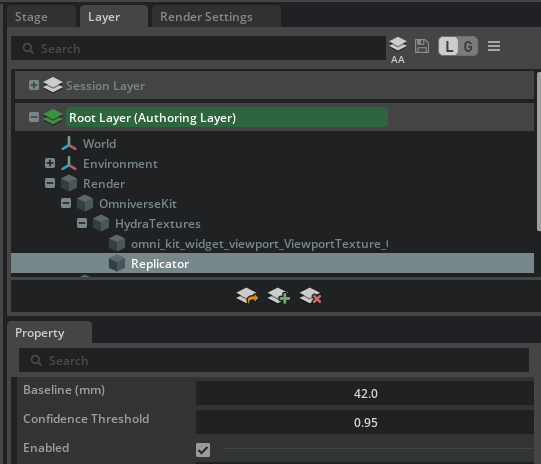
Next, observer the Layer window indicates the appropriate RenderProduct prim has been created, with a
HydraTexture and DepthSensorDistance RenderVar attached:
Updating Existing Assets to Use Depth Sensors#
To update an existing asset to use depth sensors, via the isaacsim.sensors.camera.SingleViewDepthSensorAsset class,
Isaac Sim provides a convenient API. The following example demonstrates how to update a new Camera prim
as a depth sensor, then export it as a USD file that can be loaded as a reference in other stages using isaacsim.sensors.camera.SingleViewDepthSensorAsset.
./python.sh standalone_examples/api/isaacsim.sensors.camera/camera_add_depth_sensor.py
Running the example will create a new example_camera_with_depth_sensor.usd asset in the local directory.
After opening the new asset in Isaac Sim, observe the following in the Stage window:
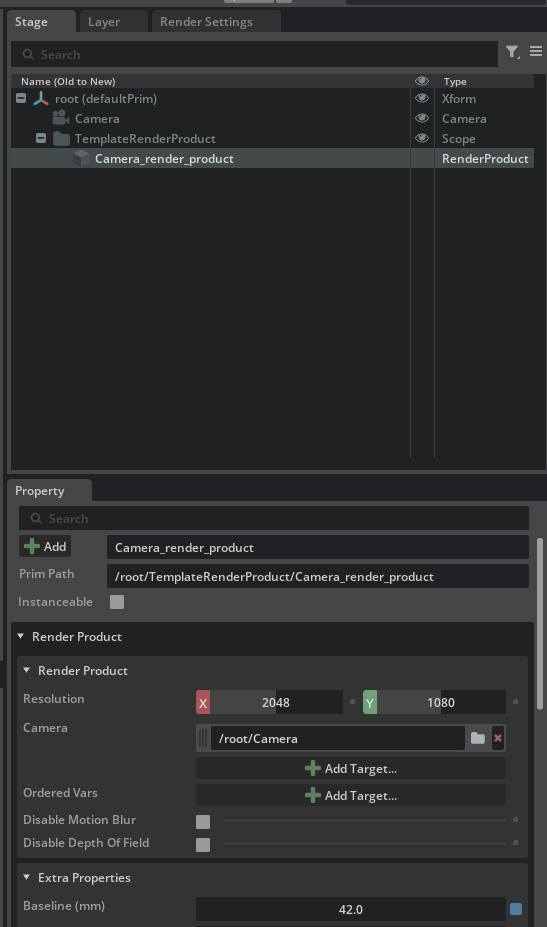
Note the new render product prim has been created and associated to the Camera prim, with the custom
value set for the omni:rtx:post:depthSensor:baselineMM attribute.
Next, open a new stage, and run the following snippet in the Script Editor to load the new asset as a reference:
from isaacsim.sensors.camera import SingleViewDepthSensorAsset
asset_path = "example_camera_with_depth_sensor.usd"
example_depth_sensor = SingleViewDepthSensorAsset(prim_path="/example_depth_sensor", asset_path=asset_path)
example_depth_sensor.initialize()
Observe in the Layer window the new render product is appropriately created, with the custom value set for the omni:rtx:post:depthSensor:baselineMM attribute.