Robot Wizard Tutorial#
In this tutorial, we will provide a step-by-step guide for using the Robot Wizard to create a mock robot that contains a fixed base, a prismatic joint, and a revolute joint.
First load the file we prepared for this tutorial onto stage. Go to Isaac/Samples/Rigging/RobotWizard/ and open the original file for raw_blocks.usd.
For more in-depth explanation about the Wizard, go to Robot Wizard [Beta].
If the Wizard window is not already open, open it from Window > Robot Wizard. If you don’t see the wizard under the Window menu, go to the Window > Extensions and enable Isaac Sim Robot Wizard.
Instructions#
Add Robot Page#
Select “Configure a Robot on Stage”.
Select “custom” in the dropdown list for Robot Type
Give your robot a name. The name will be used as the robot’s parent prim name on stage.
If the robot prim is not already populated in the “Select Robot Parent Xform field, click on the dropper and select “World” from the stage popup.
Click Prepare Files to complete this page.
Prepare Files#
Indicate the root folder to save the robot files. You can also modify the robot name here if needed for creating a new folder.
Check the “Save a Copy in Robot Root Folder” for the current stage, and keep the default filepath when that field appears.
Click Next to move to the next page.
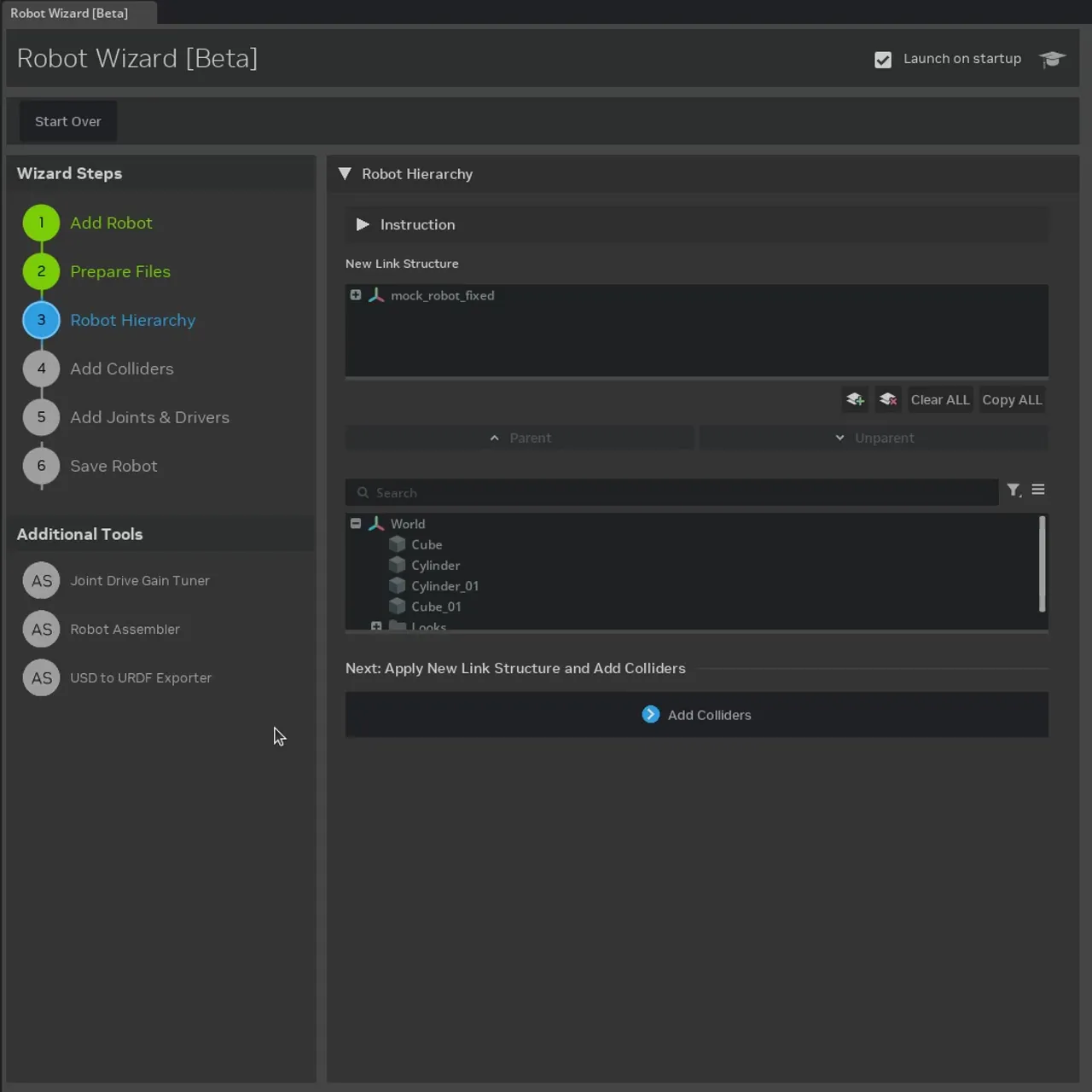
Robot Hierarchy#
Add a new link inside the New Links Structure window and name it “<robot_name>/link3”.
Put Cube and Cone under link1, Cylinder under link2, and Cylinder_01 and Cube_01 under link3.
Click Add Colliders to finish this page.
Progress Check:#
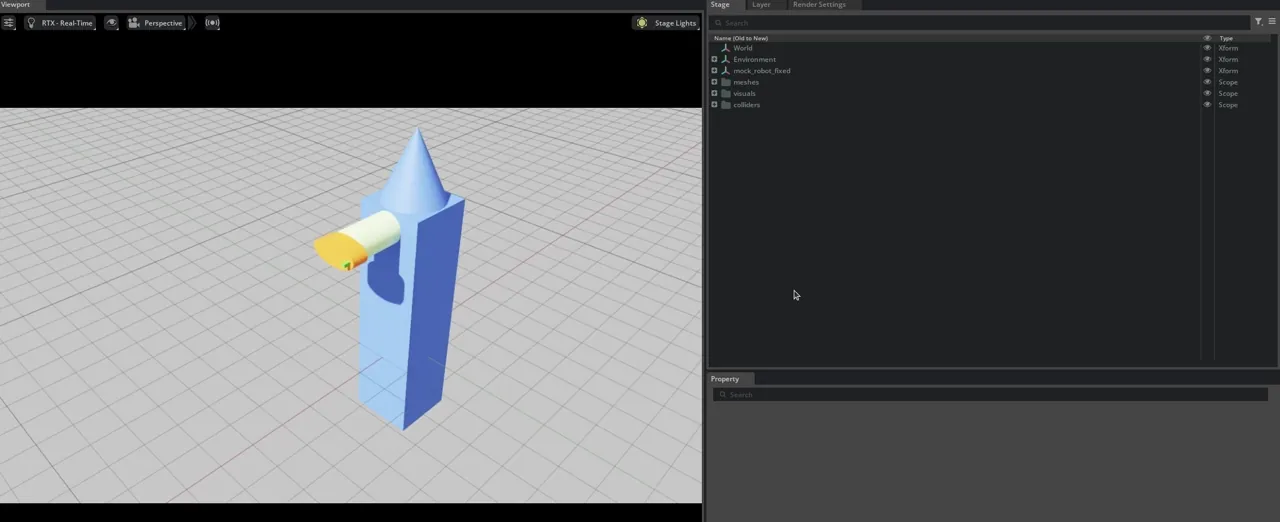
At this point, you are no longer looking at the original raw_blocks.usd file on stage. Instead, a new stage is opened with a robot that’s organized in the link structure you organized in the Robot Hierarchy page. This will look a little strange in the viewport.
Take a look at the Stage window, you’ll see that in addition to the new robot with the new structure, there are also three new “Scopes” added to the stage: meshes, visuals, and colliders.
the “meshes” scope contains the original meshes from the
raw_blocks.usdfile. Each link is a separate mesh, and each mesh has a (0,0,0) origin, that is why you are seeing two copies of each shape, some of them looking like they are clustered in the center of the grid.the “visuals” scope contains the visual meshes for each link. They are references pointing towards meshes inside the “meshes” scope that are being used for visual purposes.
the “colliders” scope contains the collision meshes for each link. They are also references, but pointing to the meshes inside the “meshes” scope that are used for collision detections. For simple shapes, the visual and collider meshese are often the same. For complex shapes, it is computationally performant to use an approximated version of the visual mesh, such as the bounding volume or convex hull. This allows for faster physics computation while retaining the visual accuracy.
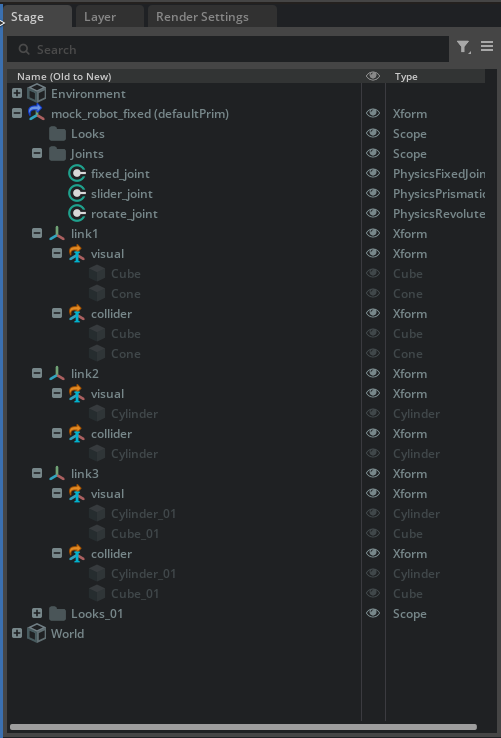
the main robot prim should contain the links as its immediate children, and each link prims should contain the visual and collider meshes as its immediate children. Additional scopes (folders) are also created to organize the materials, as well as a placeholder folder for the joints, which we will populate in a later step.
If you want to see what the new robot looks like without the original meshes distraction, simply hide the “meshes”, “visuals”, and “colliders” scopes.
Add Colliders#
For this particular asset, where the shapes are simple, there’s nothing we need to do on this page. If you are configuring a robot with more complex shapes, you may want to modify the collision approximation on the right hand column to your desired level of accuracy.
Click Add Joints & Drives to move on to the next page.
Layers:
Everything prior to adding the colliders are considered fundamental to the definition of the robot, therefore are saved in the base layer. Rigid Body APIs, Collision APIs, and Joint and Drive APIs are specifically adding properties and setting for physics simulation, and therefore are applied to the physics sublayer of the robot.
To see the layers, click on the Layers tab next to the Stage tab in the main Isaac Sim window. You should see at this point, we are in fact editing the physics layer, which has the base layer included as a sublayer.
Note
You may see some errors in the console about “FabricSceneDelegate internal issue when deleting instance” after the colliders are added. This is a known issue that will be fixed in a future release. It does not affect the functionality of the wizard or the composed robot, so you can safely ignore it for now.
Add Joints & Drives#
Click on the Create New Joint button to add a new joint.
We will make three joints to make this robot. Select Create button to add the first two, and Create & Close to add the third.
Joint Name |
Joint Type |
Axis |
Parent Link |
Child Link |
Driver Type |
|---|---|---|---|---|---|
fixed_joint |
Fixed |
— |
— |
<robot_name>/link1 |
— |
slider_joint |
Prismatic |
X |
<robot_name>/link1 |
<robot_name>/link2 |
force |
rotate_joint |
Revolute |
Z |
<robot_name>/link2 |
<robot_name>/link3 |
force |
We will also need to update the joint parameters for the slider_joint and rotate_joint. Click on the joint name in the table to open the joint settings for the selected joint.
Prismatic joint:
set the joint limit to 0 to 3
set the target position to 1
set the stiffness to 1e5 and damping to 2e4
Revolute joint:
uncheck the “Rotation is Limited” checkbox so that this joint can rotate perpetually
set the target velocity to 100.
set the stiffness to 0 to enable pure velocity drive
Click Save Robot to save the robot and move on to the next page.
Joints folder should now be populated with the three joints we created. You can confirm the settings for each joint by clicking on the joint name in the stage tree, and looking in the property panel for the joint and drive parameters.
Save Robot#
Select the “fixed_joint” as the “Articulation Root”.
Select to add a light and physics scene to the main robot file. The ground is optional since the robot has a fixed joint to the world.
Click Save Robot to finish the process.
Upon saving the robot, all the appropriate USD files are created in the robot root folder. The viewport now should show the robot from the main robot file with physics variant applied.
Click play to see the joints move. The slider joint should move to a target position, and the revolute joint should rotate perpetually.
Final Product Summary#
Here is a quick check of all the things that were done by the wizard. We have provided the final product for you to compare against your own results in the Isaac/Samples/Rigging/RobotWizard/final/ folder.
Robot Hierarchy:
There is still a vestigal /World prim on stage, for now, you can manually move the content into the robot prim’s corresponding folders. In the future, we will update the wizard to do so automatically.
Files and Folders created:
robot_root_folder/
├── configurations/
│ └── <robot-name>_robot.usd
│ └── <robot-name>_physics.usd
│ └── <robot-name>_robot.usd
└── <robot-name>.usd
└── stage_copy.usd
APIs applied:
The APIs applied can be found by selecting the prim on stage and examining the properties panel.
robot_prim (RobotAPI)
├── link1 (RigidBodyAPI, LinkAPI)
│ └── visual
│ ├── collider
│ └── <mesh> (ColliderAPI)
├── link2 (RigidBodyAPI, LinkAPI)
│ └── visual
│ ├── collider
│ └── <mesh> (ColliderAPI)
├── link3 (RigidBodyAPI, LinkAPI)
│ └── visual
│ ├── collider
│ └── <mesh> (ColliderAPI)
├── Joints
│ └── fixed_joint (JointAPI, ArticulationRootAPI)
│ └── slider_joint (JointAPI, DriveAPI, JointStateAPI)
│ └── rotate_joint (JointAPI, DriveAPI, JointStateAPI)