Non-Visual Sensors#
Isaac Sim models many types of non-visual sensors models, with digital twins found in the Content Browser under Isaac Sim/Sensors, organized into subfolders by manufacturer.
Some non-visual sensor types do not have digital twins. For more information about these sensors, including how to create them from the GUI, follow the links below:
RTX Lidars#
RTX Lidars marked as “certified” have Lidar configurations verified by the sensor manufacturer and tested before release.
Some Lidar models feature multiple configurations or profiles, which are implemented as USD Variants. In those cases, the available variants and their characteristics will also be provided as tables in the appropriate section below.
NVIDIA#
There are several example Lidar configuration files that ship with Isaac Sim. Note none of these Lidars have a mesh, so only a prim will appear in the Stage window when they are created. To create them via the UI, select the appropriate option below from the menu: Create>Sensors>RTX Lidar>NVIDIA.
Debug Rotary - a single emitter rotary Lidar configuration, used to debug simple rotary Lidar issues.
Example Rotary 2D - a 10Hz rotary Lidar configuration with emitters in a single plane.
Example Rotary - a 10Hz rotary Lidar configuration using a Gaussian beam ray type.
Example Solid_State - a solid state Lidar configuration.
Simple Example Solid State - a simple 12-emitter solid state Lidar configuration, used to debug solid state Lidar issues.
HESAI#
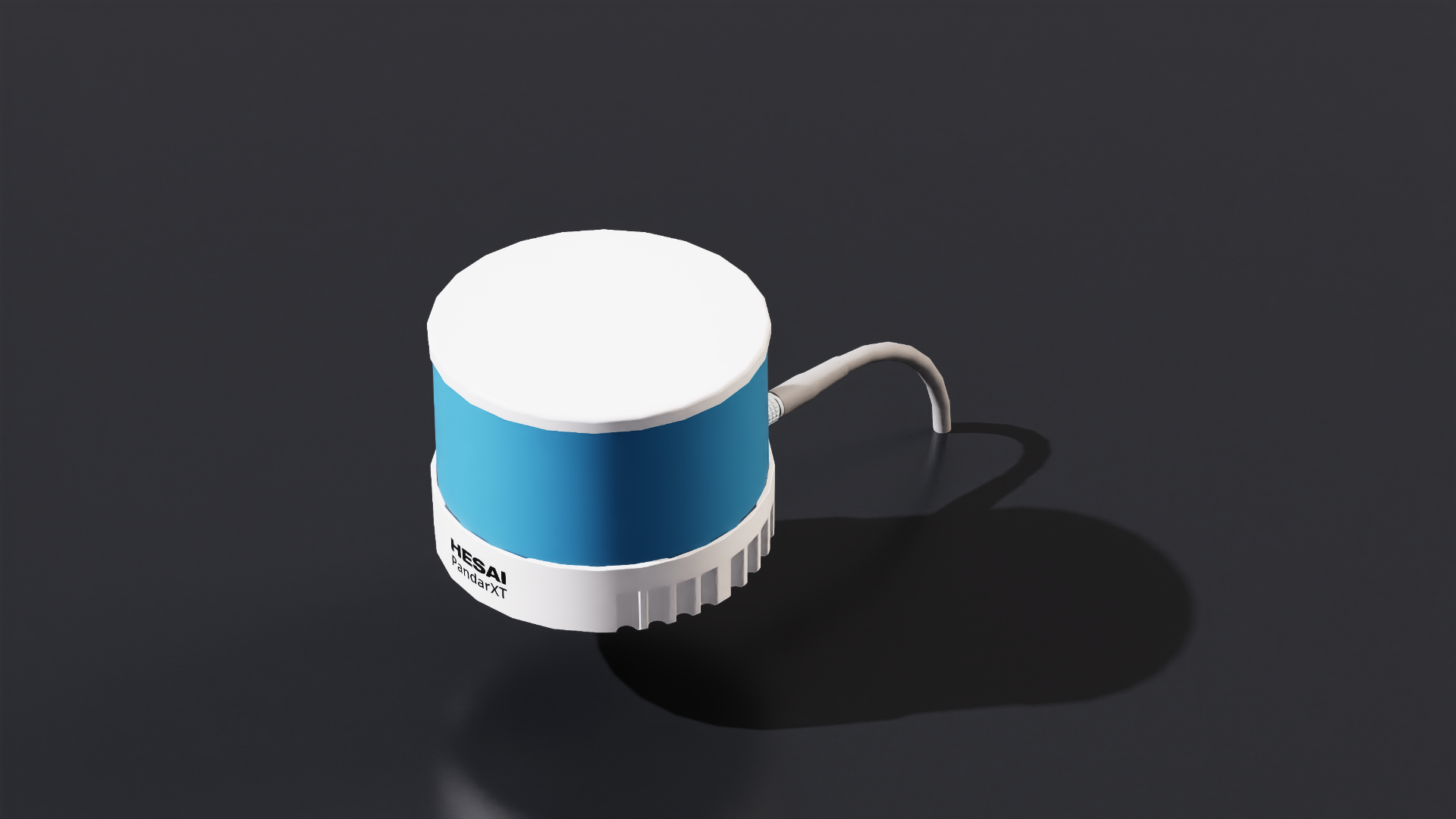
XT32 SD10#
HESAI XT32 SD10 is a high precision, 32 Channels 360 degrees spinning mid range Lidar.
To create the sensor from the menu: Create>Sensors>RTX Lidar>HESAI>XT32 SD10#
To create the sensor from the Content Browser: Isaac Sim>Sensors>HESAI>XT32_SD10>HESAI_XT32_SD10.usd
Features and Specification
name |
XT-32 10hz |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20000 |
numberOfEmitters |
32 |
nearRangeM |
0.05 |
farRangeM |
120.0 |
rangeResolutionM |
0.004 |
rangeAccuracyM |
0.02 |
minDistBetweenEchos |
0.05 |
minReflectance |
0.1 |
minReflectanceRange |
80.0 |
wavelengthNm |
905.0 |
pulseTimeNs |
10 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.015 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.0 |
maxReturns |
2 |
Other Features
Dimensions: 100 mm (Top Diameter) by 103 mm (Bottom Diameter) by 76.0 mm (Height)
Note
For the datasheet and full list of specifications, visit the XT32 SD10 product page.
Ouster#
OS0#
Ouster OS0 is a high precision Lidar for autonomous vehicles, heavy machinery, robot, and mapping solutions. Isaac Sim has several pre-configured frequencies and resolutions that can be added to the stage easily.
To create the sensor from the menu: Create>Sensors>RTX Lidar>Ouster>OS0, then select the desired sensor configuration.#
To create the sensor from the Content Browser: Isaac Sim>Sensors>Ouster>OS0>OS0.usd
Features and Specification
name |
OS0 REV6 128 10hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
5120 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
50.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
20.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV6 128 10hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
50.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
20.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV6 128 10hz @ 2048 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
50.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
20.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV6 128 20hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
50.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
20.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV6 128 20hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
50.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
20.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV7 128 10hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
5120 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
75.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
35.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV7 128 10hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
75.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
35.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV7 128 10hz @ 2048 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
75.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
35.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV7 128 20hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
75.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
35.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS0 REV7 128 20hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
75.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
35.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
Other Features
Rotation Rate: 10 or 20 hz (configurable)
Dimensions: 87 mm (Diameter) by 58.35 mm (Height). With thermal cap, height is 74.2 mm.
IMU supported: InvenSense IAM-20680HT
Note
For the datasheet and full list of specifications, visit the OS0 product page.
OS1#
Ouster OS1 is a high precision Lidar for autonomous vehicles, heavy machinery, robot, and mapping solutions. Isaac Sim has several pre-configured frequencies and resolutions that can be easily added to the stage.
To create the sensor from the menu: Create>Sensors>RTX Lidar>Ouster>OS1.#
To create the sensor from the Content Browser: Isaac Sim>Sensors>Ouster>OS1>OS1.usd
Features and Specification
name |
OS1 REV6 32 10hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
5120 |
numberOfEmitters |
32 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 32 10hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
32 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 32 10hz @ 2048 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
32 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 32 20hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
32 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 32 20hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
32 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 128 10hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
5120 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 128 10hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 128 10hz @ 2048 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 128 20hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV6 128 20hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.3 |
farRangeM |
120.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
55.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV7 128 10hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
5120 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
170.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
90.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV7 128 10hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
170.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
90.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV7 128 10hz @ 2048 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
170.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
90.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV7 128 20hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
170.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
90.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS1 REV7 128 20hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.5 |
farRangeM |
170.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.025 |
minReflectance |
0.1 |
minReflectanceRange |
90.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
Other Features
Dimensions: 87 mm (Diameter) by 58.35 mm (Height). With thermal cap, height is 74.2 mm.
IMU supported: InvenSense IAM-20680HT
Note
For the datasheet and full list of specifications, visit the OS1 product page.
OS2#
Ouster OS2 is a high precision Lidar for autonomous vehicles, heavy machinery, robot, and mapping solutions. Isaac Sim has several pre-configured frequencies and resolutions that can be easily added to the stage.
To create the sensor from the menu: Create>Sensors>RTX Lidar>Ouster>OS2.#
To create the sensor from the Content Browser: Isaac Sim>Sensors>Ouster>OS2>OS2.usd
Features and Specification
name |
OS2 REV6 128 10hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
5120 |
numberOfEmitters |
128 |
nearRangeM |
1.0 |
farRangeM |
240.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
100.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV6 128 10hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
1.0 |
farRangeM |
240.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
100.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV6 128 10hz @ 2048 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
1.0 |
farRangeM |
240.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
100.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV6 128 20hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
1.0 |
farRangeM |
240.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
100.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV6 128 20hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
1.0 |
farRangeM |
240.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.03 |
minReflectance |
0.1 |
minReflectanceRange |
100.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV7 128 10hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
5120 |
numberOfEmitters |
128 |
nearRangeM |
0.8 |
farRangeM |
350.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.02 |
minReflectance |
0.1 |
minReflectanceRange |
200.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV7 128 10hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.8 |
farRangeM |
350.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.02 |
minReflectance |
0.1 |
minReflectanceRange |
200.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV7 128 10hz @ 2048 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.8 |
farRangeM |
350.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.02 |
minReflectance |
0.1 |
minReflectanceRange |
200.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV7 128 20hz @ 512 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
10240 |
numberOfEmitters |
128 |
nearRangeM |
0.8 |
farRangeM |
350.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.02 |
minReflectance |
0.1 |
minReflectanceRange |
200.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
name |
OS2 REV7 128 20hz @ 1024 resolution |
|---|---|
type |
lidar |
scanRateBaseHz |
20.0 |
reportRateBaseHz |
20480 |
numberOfEmitters |
128 |
nearRangeM |
0.8 |
farRangeM |
350.0 |
rangeResolutionM |
0.001 |
rangeAccuracyM |
0.02 |
minReflectance |
0.1 |
minReflectanceRange |
200.0 |
wavelengthNm |
865.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.01 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.01 |
maxReturns |
2 |
Other Features
Dimensions: 87 mm (Diameter) by 58.35 mm (Height). With thermal cap, height is 74.2 mm.
IMU supported: InvenSense IAM-20680HT
Note
For the datasheet and full list of specifications, visit the OS2 product page.
VLS 128#
Ouster VLS 128 is a long range, ultra high resolution 3D Lidar for autonomous vehicles.
To create the sensor from the menu: Create>Sensors>RTX Lidar>Ouster>VLS 128#
To create the sensor from the Content Browser: Isaac Sim>Sensors>Ouster>VLS_128>Ouster_VLS_128.usd
Features and Specification
name |
Velodyne VLS-128 |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
18761 |
numberOfEmitters |
128 |
nearRangeM |
1.0 |
farRangeM |
200.0 |
rangeResolutionM |
0.004 |
rangeAccuracyM |
0.02 |
minReflectance |
0.1 |
minReflectanceRange |
120.0 |
wavelengthNm |
903.0 |
pulseTimeNs |
6 |
maxReturns |
2 |
Other Features
Dimensions: 165.5 mm (Diameter) by 141.3 mm (Height)
Operating Temperature: -20C to 60C
SICK#
microScan3 (Certified)#
The SICK microScan3 safety laser scanner stands for the protection of very different applications: from stationary to mobile, from simple to complex and delivers high-precision measurement data.
Features and Specification#
Profile |
Protective field range |
Scan frequency |
|---|---|---|
Profile_1 |
4.0 m |
33.3 Hz |
Profile_2 |
4.0 m |
25.0 Hz |
Profile_3 |
5.5 m |
33.3 Hz |
Profile_4 |
5.5 m |
25.0 Hz |
Profile_5 |
9.0 m |
25.0 Hz |
Profile_6 |
9.0 m |
20.0 Hz |
ℹ️ Note For the datasheet and full list of specifications, visit the microScan3 product page.
To create the sensor from the menu: Create>Sensors>RTX Lidar>SICK>microScan3#
To create the sensor from the Content Browser: Isaac Sim>Sensors>SICK>microScan3>SICK_microScan3.usd
multiScan136 (Certified)#
The SICK multiScan136 of the multiScan100 family is a 3D LiDAR sensor for mobile and stationary applications and reliably detects drop-off edges and obstacles ahead.
ℹ️ Note For the datasheet and full list of specifications, visit the multiScan136 product page.
To create the sensor from the menu: Create>Sensors>RTX Lidar>SICK>multiScan136#
To create the sensor from the Content Browser: Isaac Sim>Sensors>SICK>multiScan136>SICK_multiScan136.usd
multiScan165 (Certified)#
The SICK multiScan165 of the multiScan100 family is a 3D LiDAR sensor for mobile and stationary applications and reliably detects drop-off edges and obstacles ahead.
ℹ️ Note For the datasheet and full list of specifications, visit the multiScan165 product page.
To create the sensor from the menu: Create>Sensors>RTX Lidar>SICK>multiScan165#
To create the sensor from the Content Browser: Isaac Sim>Sensors>SICK>multiScan165>SICK_multiScan165.usd
nanoScan3 (Certified)#
The SICK nanoScan3 is the smallest safety laser scanner, which is well suited for the protection and localization of mobile platforms.
Features and Specification#
ℹ️ Note For the datasheet and full list of specifications, visit the nanoScan3 product page.

To create the sensor from the menu: Create>Sensors>RTX Lidar>SICK>nanoScan3#
To create the sensor from the Content Browser: Isaac Sim>Sensors>SICK>nanoScan3>SICK_nanoScan3.usd
picoScan150 (Certified)#
The SICK picoScan150 of the picoScan100 family is a 2D LiDAR sensor for solving demanding industrial applications such as collision avoidance or measurement and monitoring in indoor and outdoor areas.
Features and Specification#
Profile |
Scan frequency |
Angular resolution |
|---|---|---|
Profile_1 |
15 Hz |
0.5° |
Profile_2 |
15 Hz |
0.33° |
Profile_3 |
20 Hz |
0.1° |
Profile_4 |
20 Hz |
0.25° |
Profile_5 |
25 Hz |
0.25° |
Profile_6 |
30 Hz |
0.1° |
Profile_7 |
40 Hz |
0.25° |
Profile_8 |
50 Hz |
0.25° |
Profile_9 |
15 Hz |
0.05° |
Profile_10 |
40 Hz |
0.125° |
Profile_11 |
15 Hz |
1.0° |
ℹ️ Note For the datasheet and full list of specifications, visit the picoScan150 product page.
To create the sensor from the menu: Create>Sensors>RTX Lidar>SICK>picoScan150#
To create the sensor from the Content Browser: Isaac Sim>Sensors>SICK>picoScan150>SICK_picoScan150.usd
TiM781 (Certified)#
The SICK TiM781 of the TiM family is a 2D LiDAR sensor for collision protection for mobile applications, object measurement or monitoring of objects.
ℹ️ Note For the datasheet and full list of specifications, visit the TiM781 product page.
To create the sensor from the menu: Create>Sensors>RTX Lidar>SICK>TiM781#
To create the sensor from the Content Browser: Isaac Sim>Sensors>SICK>tim781.usd
SLAMTEC#
RPLIDAR S2E#
SLAMTEC RPLIDAR S2E is a low cost 360 degrees 2D laser scanner Lidar from SLAMTEC.
To create the sensor from the menu: Create>Sensors>RTX Lidar>Slamtec>RPLIDAR S2E#
To create the sensor from the Content Browser: Isaac Sim>Sensors>Slamtec>RPLIDAR_S2E.usd
Features and Specification
name |
RPLIDAR S2E |
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
32000 |
numberOfEmitters |
1 |
nearRangeM |
0.05 |
farRangeM |
30.0 |
rangeResolutionM |
0.013 |
rangeAccuracyM |
0.03 |
minDistBetweenEchos |
0.05 |
minReflectance |
0.1 |
minReflectanceRange |
10.0 |
wavelengthNm |
905.0 |
pulseTimeNs |
5 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.0 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.0 |
maxReturns |
1 |
Note
For the datasheet and full list of specifications, vist the RPLIDAR S2 product page.
ZVISION#
ML-30s+ (Certified)#
ZVISION ML-30s+ is a short range automotive grade solid state Lidar. Note there is no mesh for this lidar, so when it is created via the UI, only a prim will appear in the Stage window.
Features and Specification
name |
ML-30s+ |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10 |
numberOfEmitters |
51200 |
numberOfChannels |
51200 |
nearRangeM |
0.2 |
farRangeM |
45.0 |
effectiveApertureSize |
0.01 |
focusDistM |
0.12 |
rangeResolutionM |
0.03 |
rangeAccuracyM |
0.03 |
minDistBetweenEchos |
0.2 |
minReflectance |
0.1 |
minReflectanceRange |
270.0 |
wavelengthNm |
905.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.025 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.025 |
maxReturns |
2 |
To create the sensor from the menu: Create>Sensors>RTX Lidar>ZVISION>ML30S+
To create the sensor from the Content Browser: Isaac Sim>Sensors>ZVISION>ZVISION_ML30S.usda
Note
For the datasheet and full list of specifications, visit the ML-30s+ product page.
ML-Xs (Certified)#
ZVISION ML-Xs is a long range automotive high performance grade solid state Lidar. Note there is no mesh for this lidar, so when it is created via the UI, only a prim will appear in the Stage window.
Features and Specification
name |
ML-Xs |
|---|---|
type |
lidar |
scanRateBaseHz |
10.0 |
reportRateBaseHz |
10 |
numberOfEmitters |
108000 |
numberOfChannels |
108000 |
nearRangeM |
0.5 |
farRangeM |
250 |
effectiveApertureSize |
0.01 |
focusDistM |
0.12 |
rangeResolutionM |
0.03 |
rangeAccuracyM |
0.05 |
minReflectance |
0.1 |
minReflectanceRange |
270.0 |
wavelengthNm |
1550.0 |
pulseTimeNs |
6 |
azimuthErrorMean |
0.0 |
azimuthErrorStd |
0.025 |
elevationErrorMean |
0.0 |
elevationErrorStd |
0.025 |
maxReturns |
2 |
To create the Lidar prim: Create>Sensors>RTX Lidar>ZVISION>MLXS
To create the sensor from the Content Browser: Isaac Sim>Sensors>ZVISION>ZVISION_MLXS.usda
Note
For the datasheet and full list of specifications, visit the ML-Xs product page.
Tactile Sensors#
Tashan Technology#
Universal Tactile Sensor TS-F-A (Certified)#
Tashan Technology Universal Tactile Sensor TS-F-A is a tactile simulation model based on real products to advance research and innovation in robotic tactile perception technology and promote the development of embodied intelligent robots.

Features and Specification
- Outputs 11 dimensional feature channels:
Proximity sensing [1]
Tactile sensing [2-4]: Normal force, tangential force, tangential force direction
Raw capacitance values [5-11]: 7-channel raw capacitance data
To create the sensor from the Content Browser: Isaac Sim>Sensors>Tashan>TS-F-A>TS-F-A.usd
Note
For usage in Isaac Sim, visit the Tashan Technology Tactile Simulation Platform User Manual.
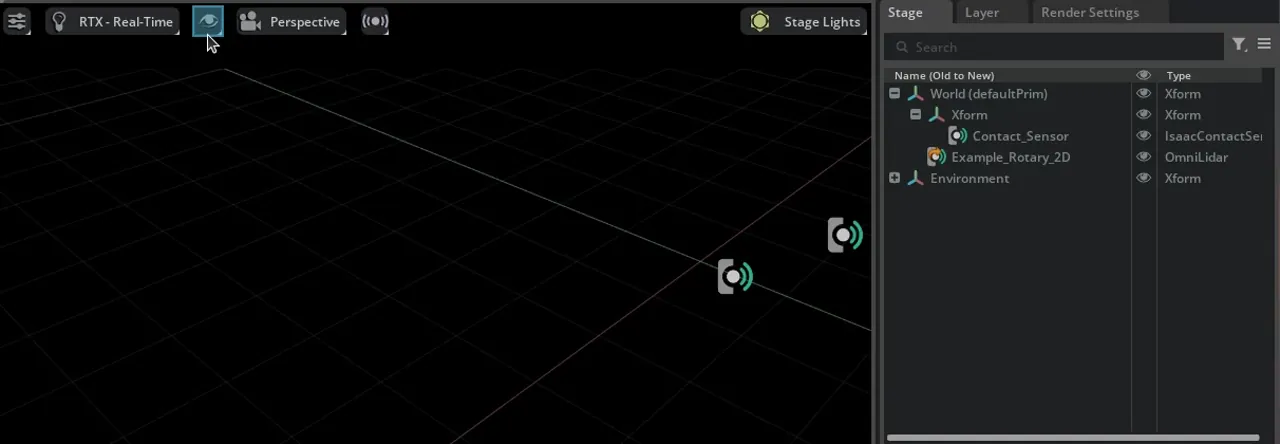
Sensor Gizmo in Viewport#
In Isaac Sim, the sensor functions are decoupled from physical meshes, and you can have sensors on stage without any mesh associated with the sensor. We use sensor gizmo to track the location of the actual sensing functions regardless of mesh. The gizmos are not visible by default, but you can toggle them on or off in the viewport.
To toggle the sensor gizmos, go to Viewport Menu >  > Show By Type > Sensors.
> Show By Type > Sensors.