[isaacsim.robot.poser] Isaac Sim Robot Poser#
Version: 1.0.0
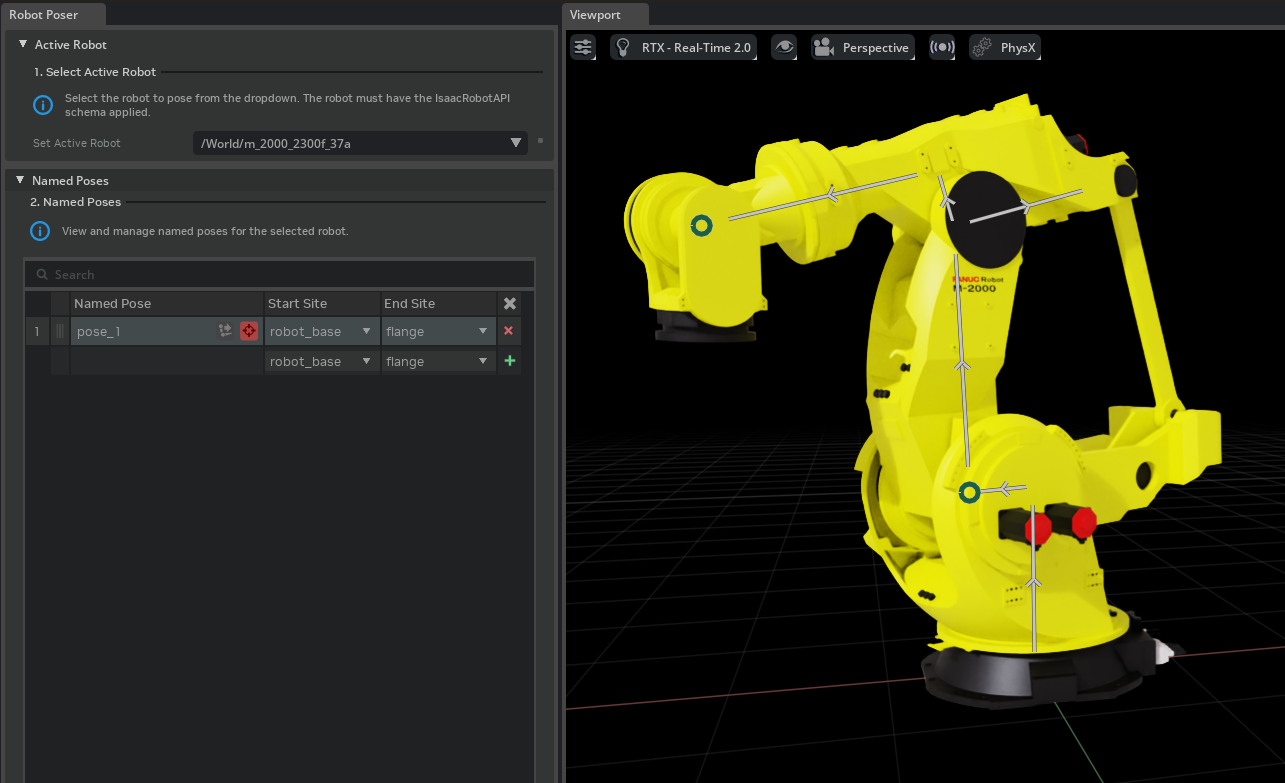
Provides Functionality to author robot named poses through Inverse Kinematics, and execute them into a robot
Enable Extension#
The extension can be enabled (if not already) in one of the following ways:
Define the next entry as an application argument from a terminal.
APP_SCRIPT.(sh|bat) --enable isaacsim.robot.poser
Define the next entry under [dependencies] in an experience (.kit) file or an extension configuration (extension.toml) file.
[dependencies]
"isaacsim.robot.poser" = {}
Open the Window > Extensions menu in a running application instance and search for isaacsim.robot.poser.
Then, toggle the enable control button if it is not already active.
API#
Python API#
Classes
High-level IK controller bound to a specific robot. |
|
Result of an IK solve or named-pose query. |
Functions
Return True if robot_prim carries the IsaacRobotAPI schema. |
|
Apply a joint-state dictionary to the robot. |
|
Apply a joint-state dictionary, keeping anchor_prim fixed. |
|
Store a named pose in the robot asset. |
|
Apply a previously stored named pose. |
|
Retrieve a named pose from the robot asset. |
|
Return the names of all named poses registered on robot_prim. |
|
Remove a named pose from the robot asset. |
|
Export all named poses on robot_prim to a JSON file. |
|
Import named poses from a JSON file and store them on robot_prim. |
Classes#
- class RobotPoser(
- stage: Usd.Stage,
- robot_prim: Usd.Prim,
- start_prim: Usd.Prim | None = None,
- end_prim: Usd.Prim | None = None,
- solver_name: str | None = None,
- *,
- debug: bool = False,
Bases:
objectHigh-level IK controller bound to a specific robot.
Wraps a
KinematicChain(which owns the joint chain, kinematic tree, and FK/USD I/O) and adds IK solving, solution seeding, and unit conversion on top.Construct with a
Usd.Stageand robot prim, optionally providing start/end prims to configure the kinematic chain immediately. The chain can be switched at any time viaset_chain(). Once configured,solve_ik()only requires a target transform and optional solver keyword arguments.- Parameters:
stage – USD stage containing the robot.
robot_prim – Robot root prim (must carry IsaacRobotAPI).
start_prim – Start of the IK chain. Optional.
end_prim – End of the IK chain. Optional.
solver_name – Name of the registered IK solver. Defaults to registry default.
debug – Enable verbose debug output for chain building and FK.
- apply_pose(joint_dict: dict[str, float]) None#
Apply joint values to the robot, anchoring at the start link.
For chains that include backward (child-to-parent) joints the standard root-anchored teleport would move the start link. This method applies the joints and then rigidly corrects the entire robot so the start link remains at its original world position. During simulation delegates to _drive_robot directly.
- Parameters:
joint_dict – Mapping of joint prim path to value (radians or meters).
- classmethod apply_pose_by_target(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- start_prim: pxr.Usd.Prim,
- end_prim: pxr.Usd.Prim,
- target: Transform,
- seed: ndarray | None = None,
Solve IK and immediately apply the result to the robot.
Constructs a
RobotPoser, solves IK, and applies the solution in a single call — reusing the same kinematic chain for both operations.- Parameters:
stage – USD stage containing the robot.
robot_prim – Robot root prim (must carry IsaacRobotAPI).
start_prim – Start of the IK chain (link or site).
end_prim – End of the IK chain (link or site).
target – Desired end-effector pose in robot-base frame.
seed – Initial joint guess, or None for zero.
- Returns:
PoseResult with success, joints, and target info.
- joints_to_native_values(
- joint_dict: dict[str, float],
Convert a joint dict (radians) to native USD units.
Revolute joints are converted to degrees; prismatic joints are left unchanged. Values are returned in joint-chain order.
- Parameters:
joint_dict – Mapping of joint prim path to value in radians (or meters).
- Returns:
Values in joint-chain order (degrees for revolute, meters for prismatic).
- set_chain(
- start_prim: pxr.Usd.Prim,
- end_prim: pxr.Usd.Prim,
Set or switch the kinematic chain.
Builds a new
KinematicChainand resets the solution seed.- Parameters:
start_prim – Start of the IK chain (link or site).
end_prim – End of the IK chain (link or site).
- set_seed(
- seed: dict[str, float] | ndarray | list[float] | None,
Set the solution seed for the next solve_ik call.
- Parameters:
seed – When a dict, maps joint prim paths to values (as in PoseResult.joints). When array-like, values are in joint-chain order. None clears the seed.
- solve_ik(
- target: Transform,
- seed: dict[str, float] | ndarray | list[float] | None = None,
- *,
- tolerance: float = 0.0001,
- **solver_kwargs,
Solve inverse kinematics for the configured chain.
- Parameters:
target – Desired end-effector pose in the robot-base frame.
seed – Initial joint-value guess. When None, uses the last successful solution or zeros.
tolerance – Convergence threshold on the pose-error norm.
**solver_kwargs – Forwarded to the IK solver (e.g. lam, iters, null_space_bias, joint_fixed). joint_fixed can be a dict mapping joint prim path to bool to lock DOFs.
- Returns:
PoseResult with success, joints, and target info.
- property joints: list#
Copy of the internal joint chain (list of
Joint).
- property robot_prim: pxr.Usd.Prim#
The robot root prim.
- property solver: IKSolver#
The active
IKSolverinstance.
- property stage: pxr.Usd.Stage#
The USD stage.
- class PoseResult(
- success: bool,
- joints: dict[str,
- float] = <factory>,
- joint_fixed: dict[str,
- bool] = <factory>,
- start_link: str = '',
- end_link: str = '',
- target_position: list[float] | None = None,
- target_orientation: list[float] | None = None,
Bases:
objectResult of an IK solve or named-pose query.
- Parameters:
success – Whether the IK solve converged or the stored pose is valid.
joints – Mapping of joint prim path to joint value (radians for revolute, meters for prismatic).
joint_fixed – Mapping of joint prim path to fixed flag.
Falsefor every movable joint in the chain.start_link – Prim path of the chain start link.
end_link – Prim path of the chain end link / site.
target_position – Target position
[x, y, z]in robot-base frame.target_orientation – Target orientation
[w, x, y, z]quaternion in robot-base frame.
- end_link: str = ''#
- joint_fixed: dict[str, bool]#
- joints: dict[str, float]#
- start_link: str = ''#
- success: bool#
Functions#
- validate_robot_schema(robot_prim: pxr.Usd.Prim) bool#
Return True if robot_prim carries the IsaacRobotAPI schema.
- Parameters:
robot_prim – Robot root USD prim to check.
- Returns:
True if the prim has IsaacRobotAPI.
- apply_joint_state(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- joint_dict: dict[str, float],
Apply a joint-state dictionary to the robot.
When simulation is stopped, teleports via FK and joint attributes. When simulation is running, sends DOF targets via Articulation.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim (must carry IsaacRobotAPI).
joint_dict – Joint prim path to value (radians or meters).
- apply_joint_state_anchored(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- joint_dict: dict[str, float],
- anchor_prim: pxr.Usd.Prim,
Apply a joint-state dictionary, keeping anchor_prim fixed.
Like apply_joint_state but rigidly corrects so anchor_prim stays at its original world position. During simulation sends DOF targets directly.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
joint_dict – Joint prim path to value (radians or meters).
anchor_prim – Prim to keep fixed.
- store_named_pose(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- pose_name: str,
- pose_result: PoseResult,
Store a named pose in the robot asset.
Creates an IsaacNamedPose prim under Named_Poses and registers it in the robot’s namedPoses relationship. The prim’s Xform is set to the end-link target pose.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
pose_name – Human-readable name for the pose.
pose_result – Must have success=True.
- Returns:
True when the pose was persisted.
- apply_pose_by_name(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- pose_name: str,
Apply a previously stored named pose.
Teleports when simulation is stopped, drives via joint targets when running.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
pose_name – Name of the stored pose.
- Returns:
True if the pose was found and applied.
- get_named_pose(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- pose_name: str,
Retrieve a named pose from the robot asset.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
pose_name – Name of the stored pose.
- Returns:
PoseResult, or None when no pose with that name exists.
- list_named_poses(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
Return the names of all named poses registered on robot_prim.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
- Returns:
List of pose names.
- delete_named_pose(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- pose_name: str,
Remove a named pose from the robot asset.
Deletes the IsaacNamedPose prim and removes it from namedPoses.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
pose_name – Name of the pose to remove.
- Returns:
True when the pose existed and was removed.
- export_poses(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- filepath: str,
- *,
- degrees: bool = False,
Export all named poses on robot_prim to a JSON file.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
filepath – Destination file path.
degrees – If True, revolute joint values are written in degrees (native USD units) instead of the default radians.
- Returns:
True on success.
- import_poses(
- stage: pxr.Usd.Stage,
- robot_prim: pxr.Usd.Prim,
- filepath: str,
Import named poses from a JSON file and store them on robot_prim.
- Parameters:
stage – USD stage.
robot_prim – Robot root prim.
filepath – Source file path (as written by export_poses).
- Returns:
Number of poses successfully imported.