Contact Sensor#
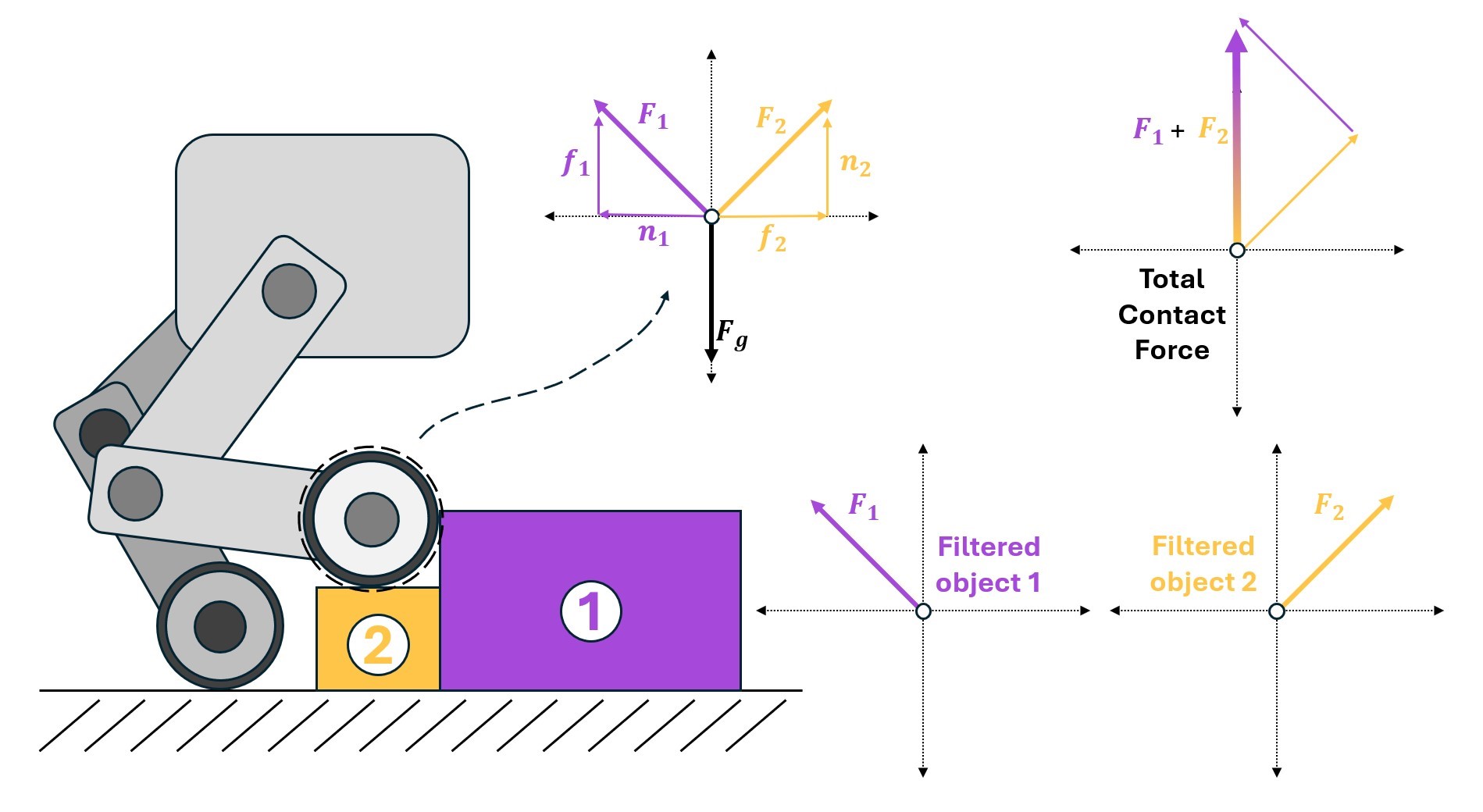
The contact sensor is designed to return the net contact force acting on a given ridgid body. The sensor is written to behave as a physical object, and so the “scope” of the contact sensor is limited to the body (or bodies) that defines it. There are multiple ways to define this scope, depending on your need to filter the forces coming from the contact.
By default, the reported force is the total contact force, but your application may only care about contact forces due to specific objects. Retrieving contact forces from specific objects requires filtering, and this can only be done in a “many-to-one” way. A multi-legged robot that needs filterable contact information for its feet would require one sensor per foot to be defined in the environment, but a robotic hand with contact sensors on the tips of each finger can be defined with a single sensor.
Consider a simple environment with an Anymal Quadruped and a block
@configclass
class ContactSensorSceneCfg(InteractiveSceneCfg):
"""Design the scene with sensors on the robot."""
# ground plane
ground = AssetBaseCfg(prim_path="/World/defaultGroundPlane", spawn=sim_utils.GroundPlaneCfg())
# lights
dome_light = AssetBaseCfg(
prim_path="/World/Light", spawn=sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75))
)
# robot
robot = ANYMAL_C_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
# Rigid Object
cube = RigidObjectCfg(
prim_path="{ENV_REGEX_NS}/Cube",
spawn=sim_utils.CuboidCfg(
size=(0.5, 0.5, 0.1),
rigid_props=sim_utils.RigidBodyPropertiesCfg(),
mass_props=sim_utils.MassPropertiesCfg(mass=100.0),
collision_props=sim_utils.CollisionPropertiesCfg(),
physics_material=sim_utils.RigidBodyMaterialCfg(static_friction=1.0),
visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0), metallic=0.2),
),
init_state=RigidObjectCfg.InitialStateCfg(pos=(0.5, 0.5, 0.05)),
)
contact_forces_LF = ContactSensorCfg(
prim_path="{ENV_REGEX_NS}/Robot/LF_FOOT",
update_period=0.0,
history_length=6,
debug_vis=True,
filter_prim_paths_expr=["{ENV_REGEX_NS}/Cube"],
)
contact_forces_RF = ContactSensorCfg(
prim_path="{ENV_REGEX_NS}/Robot/RF_FOOT",
update_period=0.0,
history_length=6,
debug_vis=True,
filter_prim_paths_expr=["{ENV_REGEX_NS}/Cube"],
)
contact_forces_H = ContactSensorCfg(
prim_path="{ENV_REGEX_NS}/Robot/.*H_FOOT",
update_period=0.0,
history_length=6,
debug_vis=True,
)
We define the sensors on the feet of the robot in two different ways. The front feet are independent sensors (one sensor body per foot) and the “Cube” is placed under the left foot. The hind feet are defined as a single sensor with multiple bodies.
We can then run the scene and print the data from the sensors
def run_simulator(sim: sim_utils.SimulationContext, scene: InteractiveScene):
.
.
.
# Simulate physics
while simulation_app.is_running():
.
.
.
# print information from the sensors
print("-------------------------------")
print(scene["contact_forces_LF"])
print("Received force matrix of: ", scene["contact_forces_LF"].data.force_matrix_w)
print("Received contact force of: ", scene["contact_forces_LF"].data.net_forces_w)
print("-------------------------------")
print(scene["contact_forces_RF"])
print("Received force matrix of: ", scene["contact_forces_RF"].data.force_matrix_w)
print("Received contact force of: ", scene["contact_forces_RF"].data.net_forces_w)
print("-------------------------------")
print(scene["contact_forces_H"])
print("Received force matrix of: ", scene["contact_forces_H"].data.force_matrix_w)
print("Received contact force of: ", scene["contact_forces_H"].data.net_forces_w)
Here, we print both the net contact force and the filtered force matrix for each contact sensor defined in the scene. The front left and front right feet report the following
-------------------------------
Contact sensor @ '/World/envs/env_.*/Robot/LF_FOOT':
view type : <class 'omni.physics.tensors.impl.api.RigidBodyView'>
update period (s) : 0.0
number of bodies : 1
body names : ['LF_FOOT']
Received force matrix of: tensor([[[[-1.3923e-05, 1.5727e-04, 1.1032e+02]]]], device='cuda:0')
Received contact force of: tensor([[[-1.3923e-05, 1.5727e-04, 1.1032e+02]]], device='cuda:0')
-------------------------------
Contact sensor @ '/World/envs/env_.*/Robot/RF_FOOT':
view type : <class 'omni.physics.tensors.impl.api.RigidBodyView'>
update period (s) : 0.0
number of bodies : 1
body names : ['RF_FOOT']
Received force matrix of: tensor([[[[0., 0., 0.]]]], device='cuda:0')
Received contact force of: tensor([[[1.3529e-05, 0.0000e+00, 1.0069e+02]]], device='cuda:0')

Notice that even with filtering, both sensors report the net contact force acting on the foot. However, the “force matrix” on the right foot is zero because that foot isn’t in contact with the filtered body, /World/envs/env_.*/Cube. Now, checkout the data coming from the hind feet!
-------------------------------
Contact sensor @ '/World/envs/env_.*/Robot/.*H_FOOT':
view type : <class 'omni.physics.tensors.impl.api.RigidBodyView'>
update period (s) : 0.0
number of bodies : 2
body names : ['LH_FOOT', 'RH_FOOT']
Received force matrix of: None
Received contact force of: tensor([[[9.7227e-06, 0.0000e+00, 7.2364e+01],
[2.4322e-05, 0.0000e+00, 1.8102e+02]]], device='cuda:0')
In this case, the contact sensor has two bodies: the left and right hind feet. When the force matrix is queried, the result is None because this is a many body sensor, and presently Isaac Lab only supports “many to one” contact force filtering. Unlike the single body contact sensor, the reported force tensor has multiple entries, with each “row” corresponding to the contact force on a single body of the sensor (matching the ordering at construction).
Code for contact_sensor.py
1# Copyright (c) 2022-2026, The Isaac Lab Project Developers (https://github.com/isaac-sim/IsaacLab/blob/main/CONTRIBUTORS.md).
2# All rights reserved.
3#
4# SPDX-License-Identifier: BSD-3-Clause
5
6"""Launch Isaac Sim Simulator first."""
7
8import argparse
9
10from isaaclab.app import AppLauncher
11
12# add argparse arguments
13parser = argparse.ArgumentParser(description="Example on using the contact sensor.")
14parser.add_argument("--num_envs", type=int, default=1, help="Number of environments to spawn.")
15# append AppLauncher cli args
16AppLauncher.add_app_launcher_args(parser)
17# parse the arguments
18args_cli = parser.parse_args()
19
20# launch omniverse app
21app_launcher = AppLauncher(args_cli)
22simulation_app = app_launcher.app
23
24"""Rest everything follows."""
25
26import torch
27
28import isaaclab.sim as sim_utils
29from isaaclab.assets import AssetBaseCfg, RigidObjectCfg
30from isaaclab.scene import InteractiveScene, InteractiveSceneCfg
31from isaaclab.sensors import ContactSensorCfg
32from isaaclab.utils import configclass
33
34##
35# Pre-defined configs
36##
37from isaaclab_assets.robots.anymal import ANYMAL_C_CFG # isort: skip
38
39
40@configclass
41class ContactSensorSceneCfg(InteractiveSceneCfg):
42 """Design the scene with sensors on the robot."""
43
44 # ground plane
45 ground = AssetBaseCfg(prim_path="/World/defaultGroundPlane", spawn=sim_utils.GroundPlaneCfg())
46
47 # lights
48 dome_light = AssetBaseCfg(
49 prim_path="/World/Light", spawn=sim_utils.DomeLightCfg(intensity=3000.0, color=(0.75, 0.75, 0.75))
50 )
51
52 # robot
53 robot = ANYMAL_C_CFG.replace(prim_path="{ENV_REGEX_NS}/Robot")
54
55 # Rigid Object
56 cube = RigidObjectCfg(
57 prim_path="{ENV_REGEX_NS}/Cube",
58 spawn=sim_utils.CuboidCfg(
59 size=(0.5, 0.5, 0.1),
60 rigid_props=sim_utils.RigidBodyPropertiesCfg(),
61 mass_props=sim_utils.MassPropertiesCfg(mass=100.0),
62 collision_props=sim_utils.CollisionPropertiesCfg(),
63 physics_material=sim_utils.RigidBodyMaterialCfg(static_friction=1.0),
64 visual_material=sim_utils.PreviewSurfaceCfg(diffuse_color=(0.0, 1.0, 0.0), metallic=0.2),
65 ),
66 init_state=RigidObjectCfg.InitialStateCfg(pos=(0.5, 0.5, 0.05)),
67 )
68
69 contact_forces_LF = ContactSensorCfg(
70 prim_path="{ENV_REGEX_NS}/Robot/LF_FOOT",
71 update_period=0.0,
72 history_length=6,
73 debug_vis=True,
74 filter_prim_paths_expr=["{ENV_REGEX_NS}/Cube"],
75 )
76
77 contact_forces_RF = ContactSensorCfg(
78 prim_path="{ENV_REGEX_NS}/Robot/RF_FOOT",
79 update_period=0.0,
80 history_length=6,
81 debug_vis=True,
82 filter_prim_paths_expr=["{ENV_REGEX_NS}/Cube"],
83 )
84
85 contact_forces_H = ContactSensorCfg(
86 prim_path="{ENV_REGEX_NS}/Robot/.*H_FOOT",
87 update_period=0.0,
88 history_length=6,
89 debug_vis=True,
90 )
91
92
93def run_simulator(sim: sim_utils.SimulationContext, scene: InteractiveScene):
94 """Run the simulator."""
95 # Define simulation stepping
96 sim_dt = sim.get_physics_dt()
97 sim_time = 0.0
98 count = 0
99
100 # Simulate physics
101 while simulation_app.is_running():
102 if count % 500 == 0:
103 # reset counter
104 count = 0
105 # reset the scene entities
106 # root state
107 # we offset the root state by the origin since the states are written in simulation world frame
108 # if this is not done, then the robots will be spawned at the (0, 0, 0) of the simulation world
109 root_state = scene["robot"].data.default_root_state.clone()
110 root_state[:, :3] += scene.env_origins
111 scene["robot"].write_root_pose_to_sim(root_state[:, :7])
112 scene["robot"].write_root_velocity_to_sim(root_state[:, 7:])
113 # set joint positions with some noise
114 joint_pos, joint_vel = (
115 scene["robot"].data.default_joint_pos.clone(),
116 scene["robot"].data.default_joint_vel.clone(),
117 )
118 joint_pos += torch.rand_like(joint_pos) * 0.1
119 scene["robot"].write_joint_state_to_sim(joint_pos, joint_vel)
120 # clear internal buffers
121 scene.reset()
122 print("[INFO]: Resetting robot state...")
123 # Apply default actions to the robot
124 # -- generate actions/commands
125 targets = scene["robot"].data.default_joint_pos
126 # -- apply action to the robot
127 scene["robot"].set_joint_position_target(targets)
128 # -- write data to sim
129 scene.write_data_to_sim()
130 # perform step
131 sim.step()
132 # update sim-time
133 sim_time += sim_dt
134 count += 1
135 # update buffers
136 scene.update(sim_dt)
137
138 # print information from the sensors
139 print("-------------------------------")
140 print(scene["contact_forces_LF"])
141 print("Received force matrix of: ", scene["contact_forces_LF"].data.force_matrix_w)
142 print("Received contact force of: ", scene["contact_forces_LF"].data.net_forces_w)
143 print("-------------------------------")
144 print(scene["contact_forces_RF"])
145 print("Received force matrix of: ", scene["contact_forces_RF"].data.force_matrix_w)
146 print("Received contact force of: ", scene["contact_forces_RF"].data.net_forces_w)
147 print("-------------------------------")
148 print(scene["contact_forces_H"])
149 print("Received force matrix of: ", scene["contact_forces_H"].data.force_matrix_w)
150 print("Received contact force of: ", scene["contact_forces_H"].data.net_forces_w)
151
152
153def main():
154 """Main function."""
155
156 # Initialize the simulation context
157 sim_cfg = sim_utils.SimulationCfg(dt=0.005, device=args_cli.device)
158 sim = sim_utils.SimulationContext(sim_cfg)
159 # Set main camera
160 sim.set_camera_view(eye=[3.5, 3.5, 3.5], target=[0.0, 0.0, 0.0])
161 # design scene
162 scene_cfg = ContactSensorSceneCfg(num_envs=args_cli.num_envs, env_spacing=2.0)
163 scene = InteractiveScene(scene_cfg)
164 # Play the simulator
165 sim.reset()
166 # Now we are ready!
167 print("[INFO]: Setup complete...")
168 # Run the simulator
169 run_simulator(sim, scene)
170
171
172if __name__ == "__main__":
173 # run the main function
174 main()
175 # close sim app
176 simulation_app.close()