Isaac Lab Ecosystem#
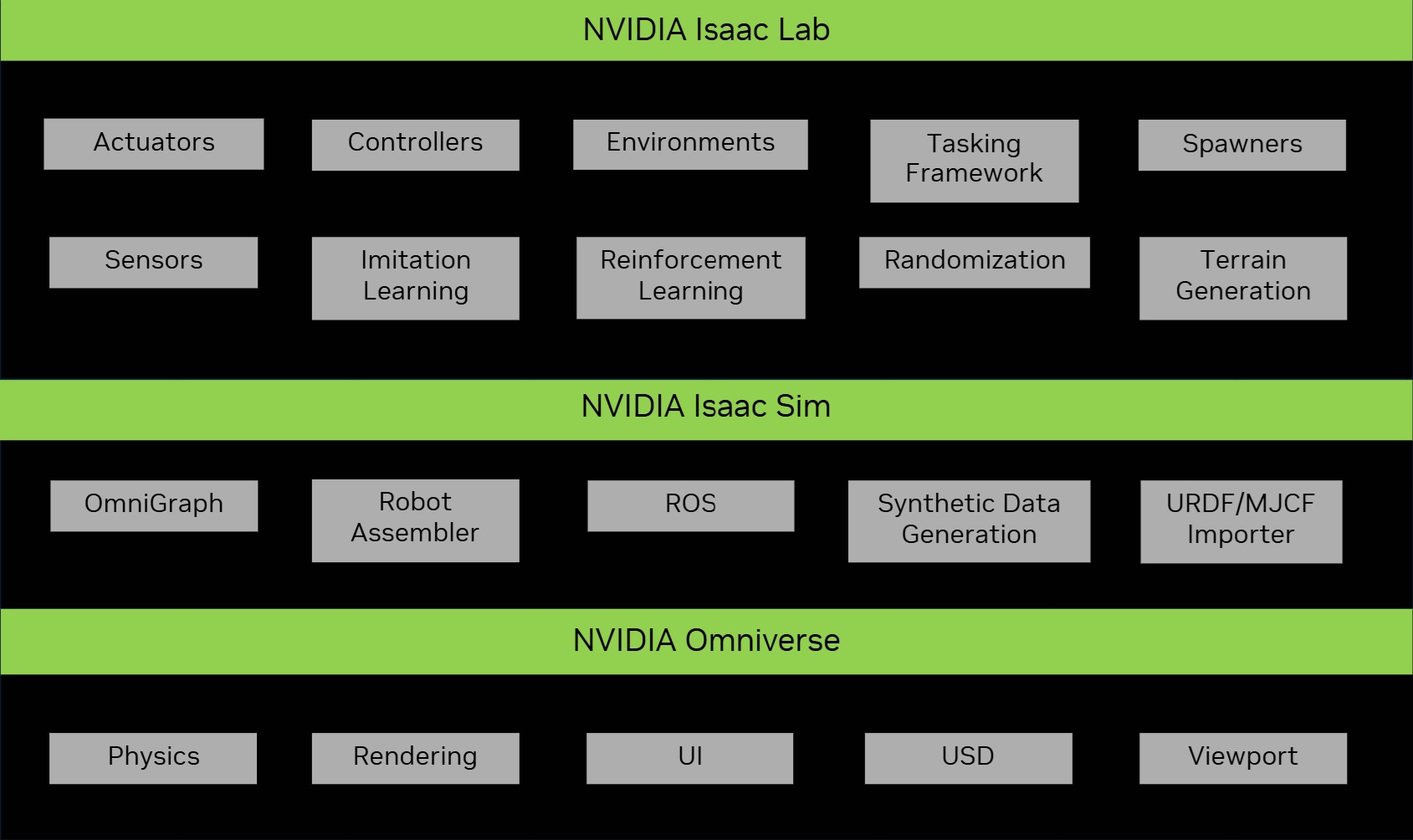
Isaac Lab is built on top of Isaac Sim to provide a unified and flexible framework for robot learning that exploits latest simulation technologies. It is designed to be modular and extensible, and aims to simplify common workflows in robotics research (such as RL, learning from demonstrations, and motion planning). While it includes some pre-built environments, sensors, and tasks, its main goal is to provide an open-sourced, unified, and easy-to-use interface for developing and testing custom environments and robot learning algorithms.
Working with Isaac Lab requires the installation of Isaac Sim, which is packaged with core robotics tools that Isaac Lab depends on, including URDF and MJCF importers, simulation managers, and ROS features. Isaac Sim also builds on top of the NVIDIA Omniverse platform, leveraging advanced physics simulation from PhysX, photorealistic rendering technologies, and Universal Scene Description (USD) for scene creation.
Isaac Lab not only inherits the capabilities of Isaac Sim, but also adds a number of new features that pertain to robot learning research. For example, including actuator dynamics in the simulation, procedural terrain generation, and support to collect data from human demonstrations.

Where does Isaac Lab fit in the Isaac ecosystem?#
Over the years, NVIDIA has developed a number of tools for robotics and AI. These tools leverage the power of GPUs to accelerate the simulation both in terms of speed and realism. They show great promise in the field of simulation technology and are being used by many researchers and companies worldwide.
Isaac Gym [MWG+21] provides a high performance GPU-based physics simulation for robot learning. It is built on top of PhysX which supports GPU-accelerated simulation of rigid bodies and a Python API to directly access physics simulation data. Through an end-to-end GPU pipeline, it is possible to achieve high frame rates compared to CPU-based physics engines. The tool has been used successfully in a number of research projects, including legged locomotion [RHRH22] [RHBH22], in-hand manipulation [HAM+22] [AML+22], and industrial assembly [NSA+22].
Despite the success of Isaac Gym, it is not designed to be a general purpose simulator for robotics. For example, it does not include interaction between deformable and rigid objects, high-fidelity rendering, and support for ROS. The tool has been primarily designed as a preview release to showcase the capabilities of the underlying physics engine. With the release of Isaac Sim, NVIDIA is building a general purpose simulator for robotics and has integrated the functionalities of Isaac Gym into Isaac Sim.
Isaac Sim is a robot simulation toolkit built on top of Omniverse, which is a general purpose platform that aims to unite complex 3D workflows. Isaac Sim leverages the latest advances in graphics and physics simulation to provide a high-fidelity simulation environment for robotics. It supports ROS/ROS2, various sensor simulation, tools for domain randomization and synthetic data creation. Tiled rendering support in Isaac Sim allows for vectorized rendering across environments, along with support for running in the cloud using Isaac Automator. Overall, it is a powerful tool for roboticists and is a huge step forward in the field of robotics simulation.
With the release of above two tools, NVIDIA also released an open-sourced set of environments called IsaacGymEnvs and OmniIsaacGymEnvs, that have been built on top of Isaac Gym and Isaac Sim respectively. These environments have been designed to display the capabilities of the underlying simulators and provide a starting point to understand what is possible with the simulators for robot learning. These environments can be used for benchmarking but are not designed for developing and testing custom environments and algorithms. This is where Isaac Lab comes in.
Isaac Lab is built on top of Isaac Sim to provide a unified and flexible framework for robot learning that exploits latest simulation technologies. It is designed to be modular and extensible, and aims to simplify common workflows in robotics research (such as RL, learning from demonstrations, and motion planning). While it includes some pre-built environments, sensors, and tasks, its main goal is to provide an open-sourced, unified, and easy-to-use interface for developing and testing custom environments and robot learning algorithms. It not only inherits the capabilities of Isaac Sim, but also adds a number of new features that pertain to robot learning research. For example, including actuator dynamics in the simulation, procedural terrain generation, and support to collect data from human demonstrations.
Isaac Lab replaces the previous IsaacGymEnvs, OmniIsaacGymEnvs and Orbit frameworks and will be the single robot learning framework for Isaac Sim. Previously released frameworks are deprecated and we encourage users to follow our migration guides to transition over to Isaac Lab.
Is Isaac Lab a simulator?#
Often, when people think of simulators, they think of various commonly available engines, such as MuJoCo, Bullet, and Flex. These engines are powerful and have been used in a number of research projects. However, they are not designed to be a general purpose simulator for robotics. Rather they are primarily physics engines that are used to simulate the dynamics of rigid and deformable bodies. They are shipped with some basic rendering capabilities to visualize the simulation and provide parsing capabilities of different scene description formats.
Various recent works combine these physics engines with different rendering engines to provide a more complete simulation environment. They include APIs that allow reading and writing to the physics and rendering engines. In some cases, they support ROS and hardware-in-the-loop simulation for more robotic-specific applications. An example of these include AirSim, DoorGym, ManiSkill, ThreeDWorld and lastly, Isaac Sim.
At its core, Isaac Lab is not a robotics simulator, but a framework for building robot learning applications on top of Isaac Sim. An equivalent example of such a framework is RoboSuite, which is built on top of MuJoCo and is specific to fixed-base robots. Other examples include MuJoCo Playground and Isaac Gym which use MJX and PhysX respectively. They include a number of pre-built tasks with separated out stand-alone implementations for individual tasks. While this is a good starting point (and often convenient), a lot of code repetition occurs across different task implementations, which can reduce code-reuse for larger projects and teams.
The main goal of Isaac Lab is to provide a unified framework for robot learning that includes a variety of tooling and features that are required for robot learning, while being easy to use and extend. It includes design patterns that simplify many of the common requirements for robotics research. These include simulating sensors at different frequencies, connecting to different teleoperation interfaces for data collection, switching action spaces for policy learning, using Hydra for configuration management, supporting different learning libraries and more. Isaac Lab supports designing tasks using manager-based (modularized) and direct (single-script similar to Isaac Gym) patterns, leaving it up to the user to choose the best approach for their use-case. For each of these patterns, Isaac Lab includes a number of pre-built tasks that can be used for benchmarking and research.
Why should I use Isaac Lab?#
Isaac Lab provides an open-sourced platform for the community to drive progress with consolidated efforts toward designing benchmarks and robot learning systems as a joint initiative. This allows us to reuse existing components and algorithms, and to build on top of each other’s work. Doing so not only saves time and effort, but also allows us to focus on the more important aspects of research. Our hope with Isaac Lab is that it becomes the de-facto platform for robot learning research and an environment zoo that leverages Isaac Sim. As the framework matures, we foresee it benefitting hugely from the latest simulation developments (as part of internal developments at NVIDIA and collaborating partners) and research in robotics.
We are already working with labs in universities and research institutions to integrate their work into Isaac Lab and hope that others in the community will join us too in this effort. If you are interested in contributing to Isaac Lab, please reach out to us.