Showroom Demos#
The main core interface extension in Isaac Lab isaaclab provides
the main modules for actuators, objects, robots and sensors. We provide
a list of demo scripts and tutorials. These showcase how to use the provided
interfaces within a code in a minimal way.
A few quick showroom scripts to run and checkout:
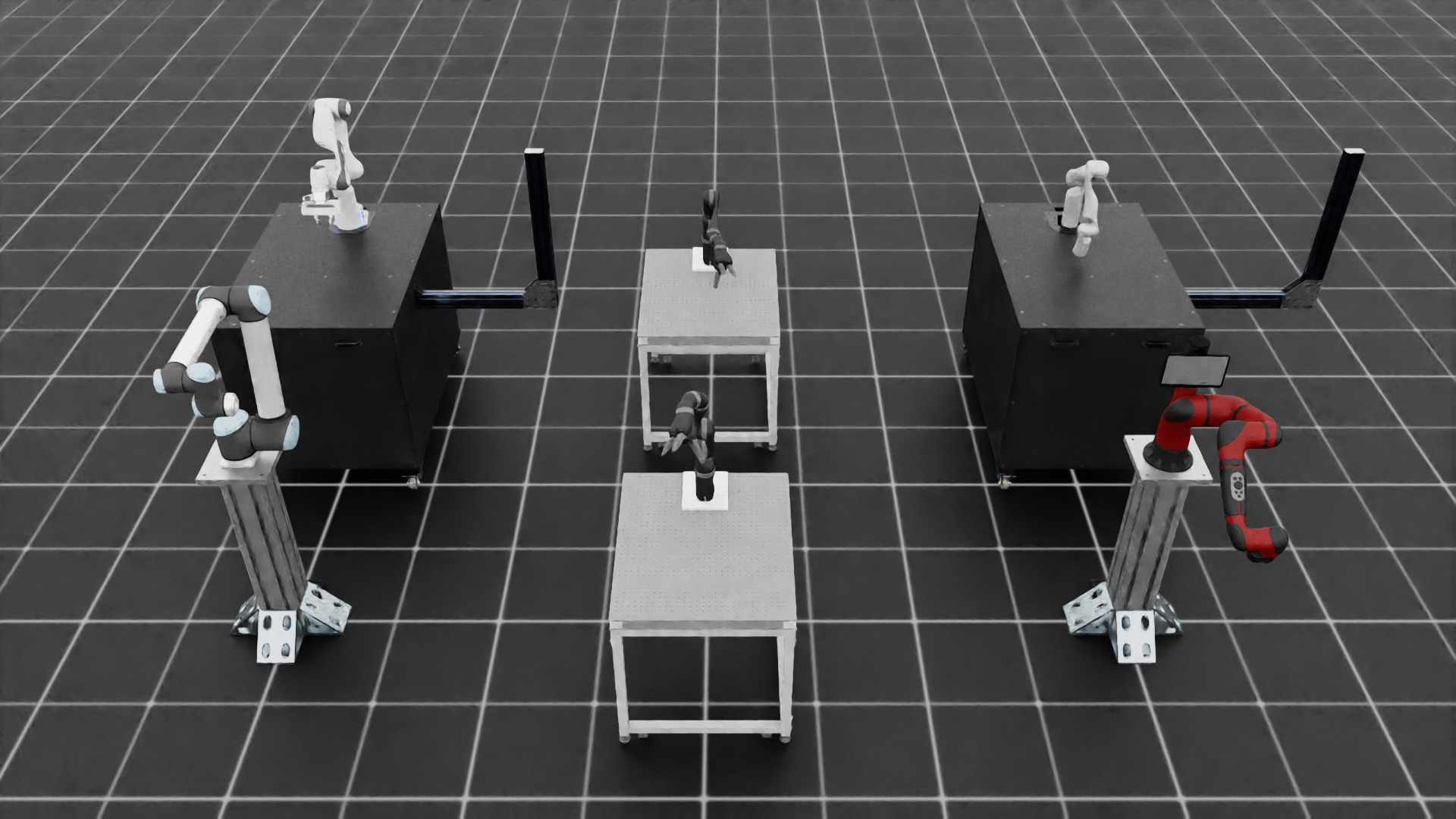
Spawn different arms and apply random joint position commands:
./isaaclab.sh -p scripts/demos/arms.py
isaaclab.bat -p scripts\demos\arms.py
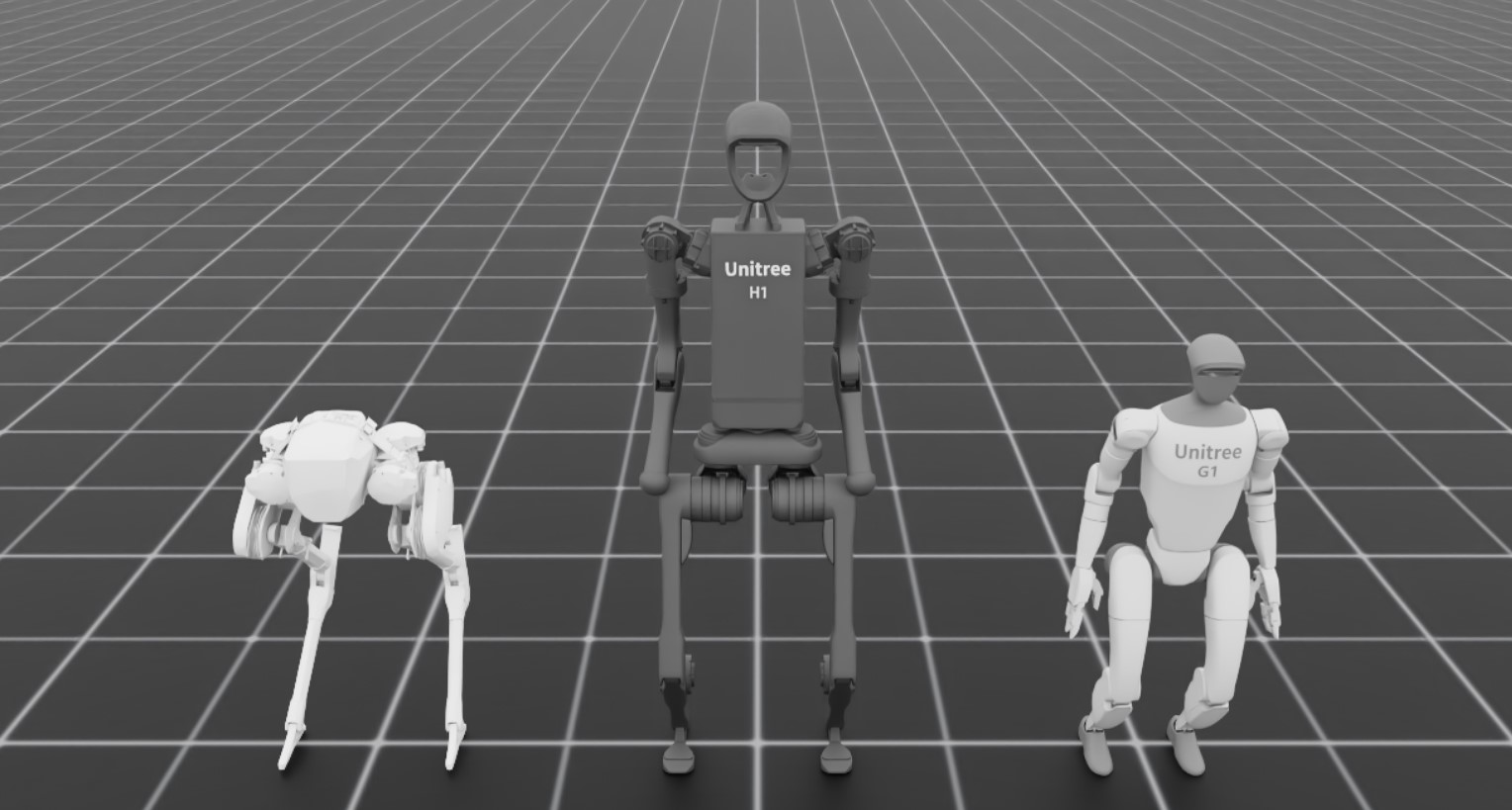
Spawn different biped robots:
./isaaclab.sh -p scripts/demos/bipeds.py
isaaclab.bat -p scripts\demos\bipeds.py
Spawn different deformable (soft) bodies and let them fall from a height:
./isaaclab.sh -p scripts/demos/deformables.py
isaaclab.bat -p scripts\demos\deformables.py

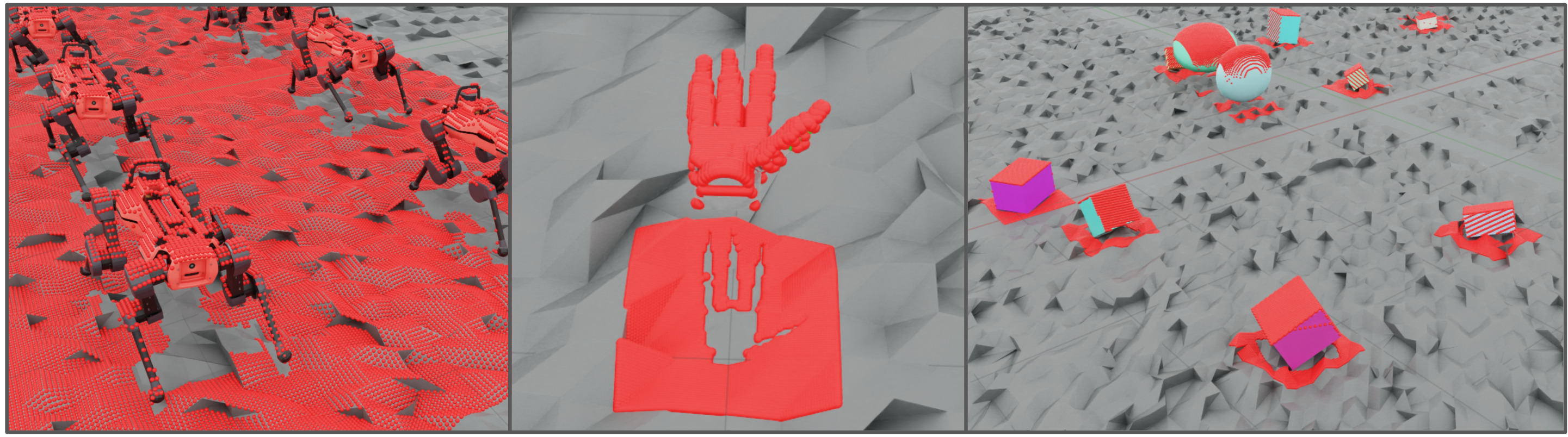
Interactive inference of trained H1 rough terrain locomotion policy:
./isaaclab.sh -p scripts/demos/h1_locomotion.py
isaaclab.bat -p scripts\demos\h1_locomotion.py

This is an interactive demo that can be run using the mouse and keyboard. To enter third-person perspective, click on a humanoid character in the scene. Once entered into third-person view, the humanoid can be controlled by keyboard using:
UP: go forwardLEFT: turn leftRIGHT: turn rightDOWN: stopC: switch between third-person and perspective viewsESC: exit current third-person view
If a misclick happens outside of the humanoid bodies when selecting a humanoid, a message is printed to console indicating the error, such as
The selected prim was not a H1 robotorMultiple prims are selected. Please only select one!.Spawn different hands and command them to open and close:
./isaaclab.sh -p scripts/demos/hands.py
isaaclab.bat -p scripts\demos\hands.py

Define multiple markers that are useful for visualizations:
./isaaclab.sh -p scripts/demos/markers.py
isaaclab.bat -p scripts\demos\markers.py

Use the interactive scene and spawn varying assets in individual environments:
./isaaclab.sh -p scripts/demos/multi_asset.py
isaaclab.bat -p scripts\demos\multi_asset.py

Use the RigidObjectCollection spawn and view manipulation to demonstrate bin-packing example:
./isaaclab.sh -p scripts/demos/bin_packing.py
isaaclab.bat -p scripts\demos\bin_packing.py

Use the interactive scene and spawn a simple parallel robot for pick and place:
./isaaclab.sh -p scripts/demos/pick_and_place.py
isaaclab.bat -p scripts\demos\pick_and_place.py

This is an interactive demo that can be run using the mouse and keyboard. Your goal is pick up the purple cube and to drop it on the red sphere! Use the following controls to interact with the simulation:
Hold the
Akey to have the gripper track the cube position.Hold the
Dkey to have the gripper track the target positionPress the
WorSkeys to move the gantry UP or DOWN respectivelyPress
QorEto OPEN or CLOSE the gripper respectively
Teleoperate a Franka Panda robot using Haply haptic device with force feedback:
./isaaclab.sh -p scripts/demos/haply_teleoperation.py --websocket_uri ws://localhost:10001 --pos_sensitivity 1.65
isaaclab.bat -p scripts\demos\haply_teleoperation.py --websocket_uri ws://localhost:10001 --pos_sensitivity 1.65

This demo requires Haply Inverse3 and VerseGrip devices. The goal of this demo is to pick up the cube or touch it with the end-effector. The Haply devices provide:
3 dimensional position tracking for end-effector control
Directional force feedback for contact sensing
Button inputs for gripper and end-effector rotation control
See Setting up Haply Teleoperation for detailed setup instructions.
Create and spawn procedurally generated terrains with different configurations:
./isaaclab.sh -p scripts/demos/procedural_terrain.py
isaaclab.bat -p scripts\demos\procedural_terrain.py

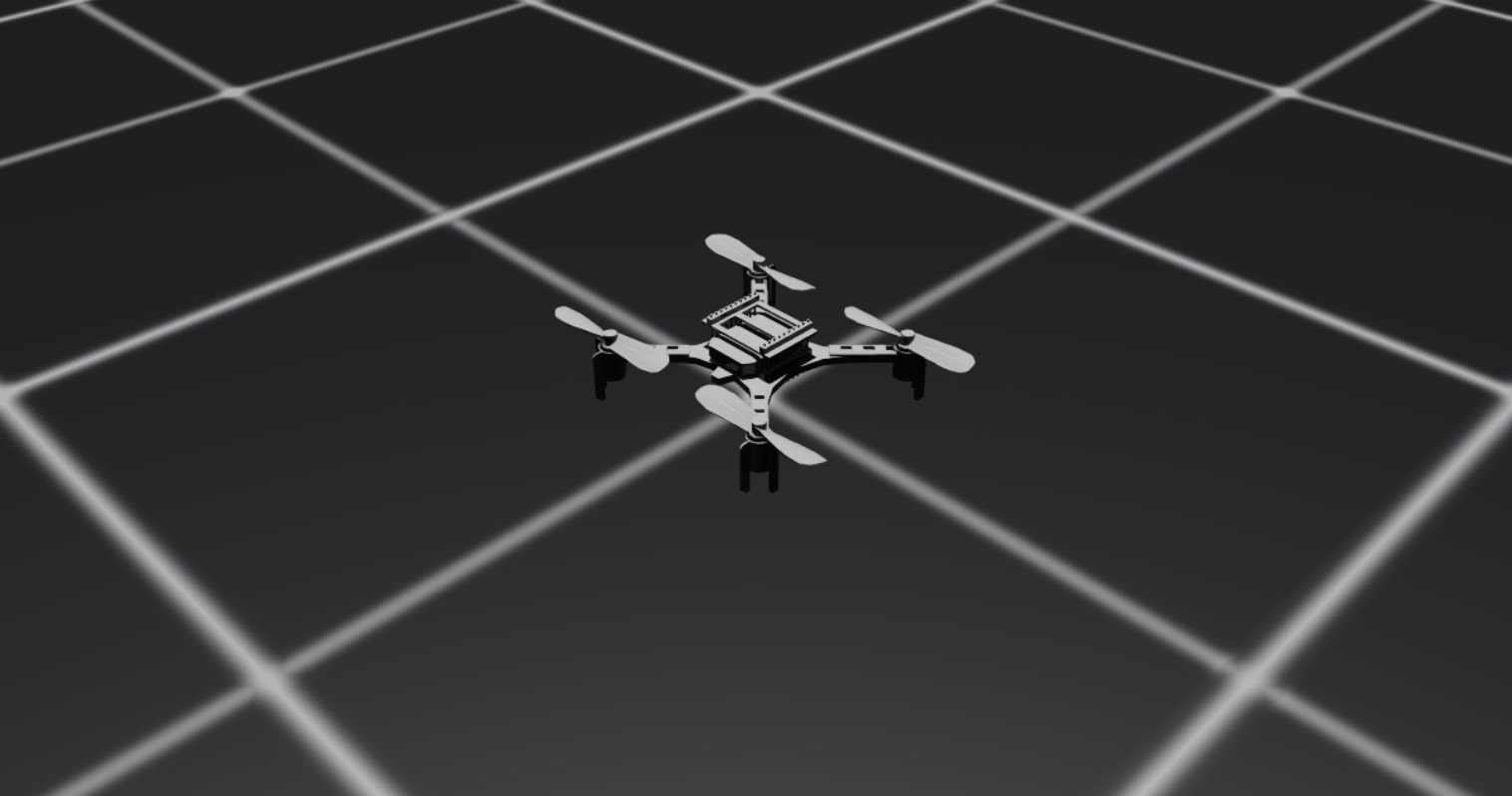
Spawn a quadcopter in the default environment:
./isaaclab.sh -p scripts/demos/quadcopter.py
isaaclab.bat -p scripts\demos\quadcopter.py
Spawn different quadrupeds and make robots stand using position commands:
./isaaclab.sh -p scripts/demos/quadrupeds.py
isaaclab.bat -p scripts\demos\quadrupeds.py

Spawn a multi-mesh ray caster that uses Warp kernels for raycasting
./isaaclab.sh -p scripts/demos/sensors/multi_mesh_raycaster.py --num_envs 16 --asset_type objects
isaaclab.bat -p scripts\demos\sensors\multi_mesh_raycaster.py --num_envs 16 --asset_type objects